research booklet link: http://issuu.com/ninapapakonstantinou/docs/fabricflation/1
Textiles’ tension and their ability to transform into self- supporting and self-adapting surfaces, when a system of patterns from different materials is embedded on them, has been our main interest from the beginning of the Digital Matter- Intelligent Constructions Studio. This system can generate significant three-dimensional structural organization from a two-dimensional leightweight and flexible surface of fabric, which grew to be our objective for the DMIC research.
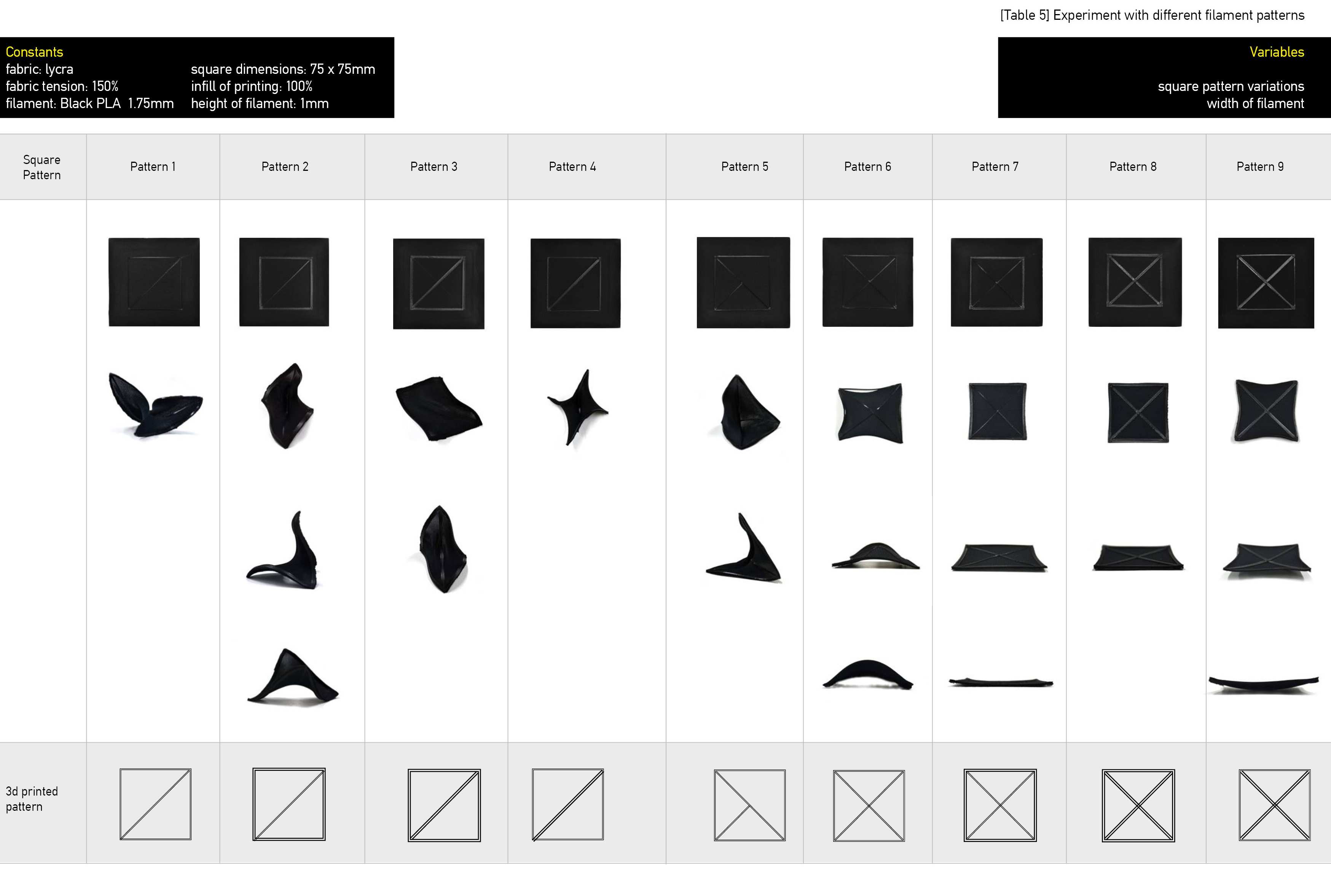
At the first stage, our research was focused on the deformations that occur when simple patterns are being 3d-printed with certain filament on stretched lycra fabric. The conclusions extracted from this stage are important for the form-finding of our final structures in a bigger scale.
.
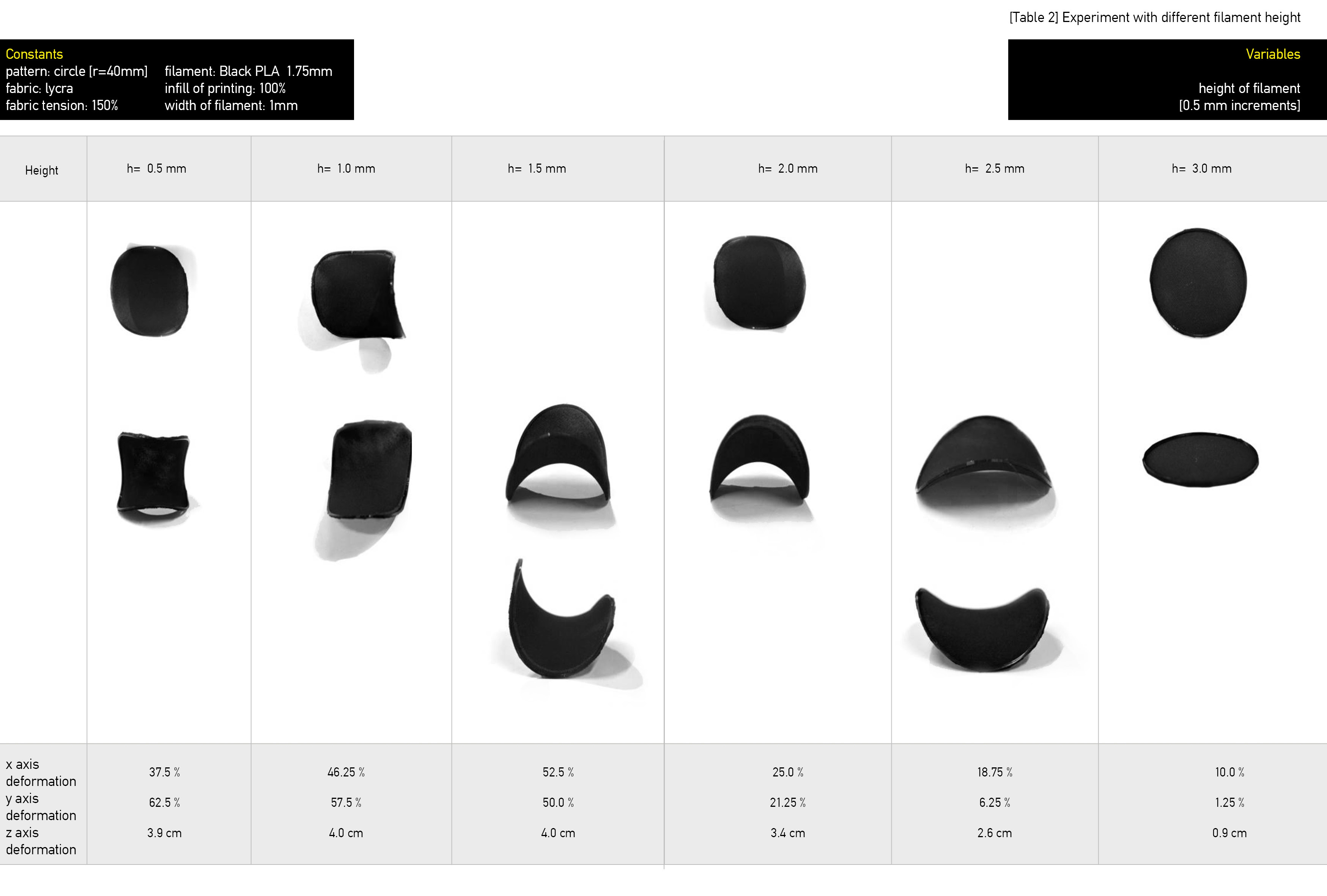
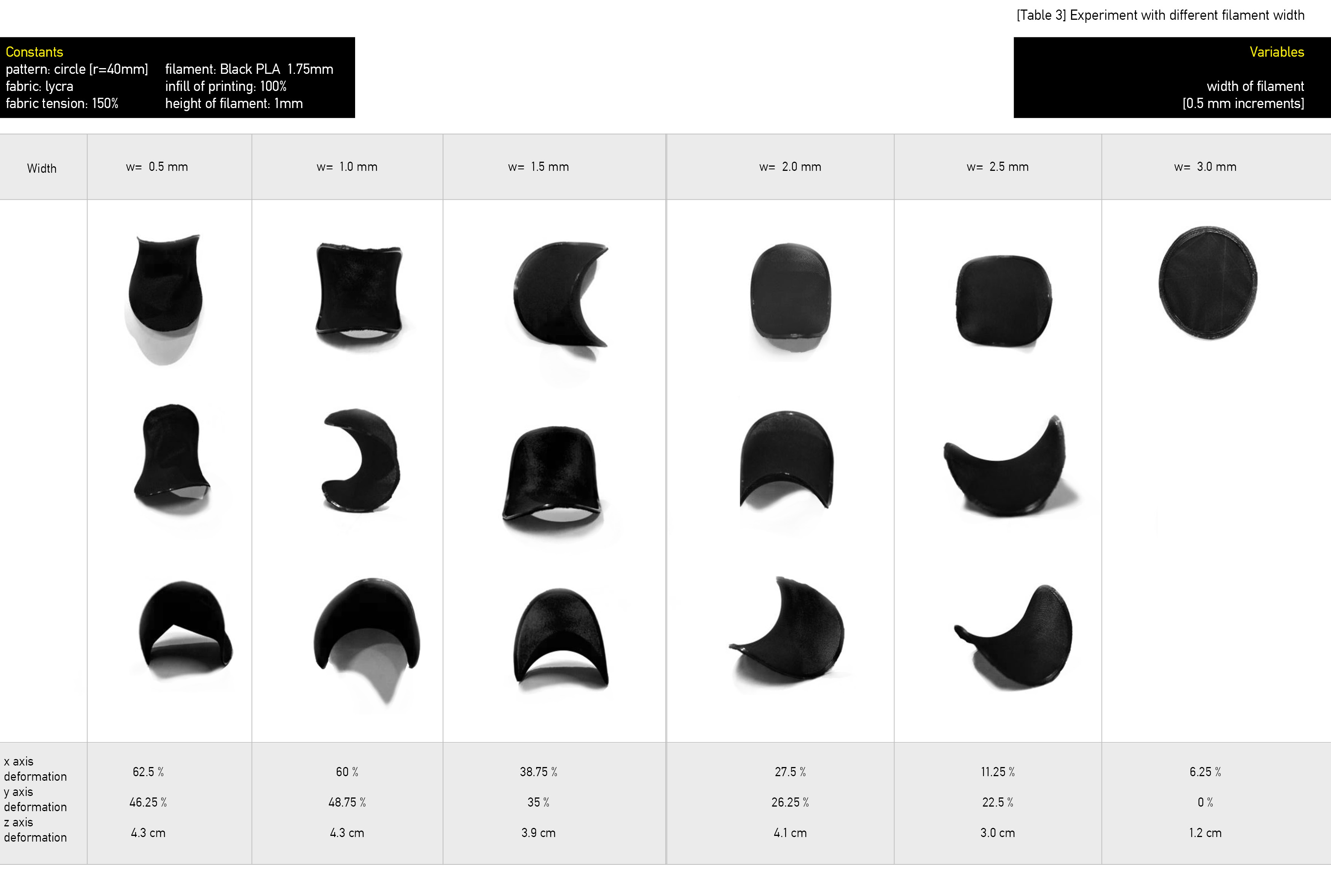

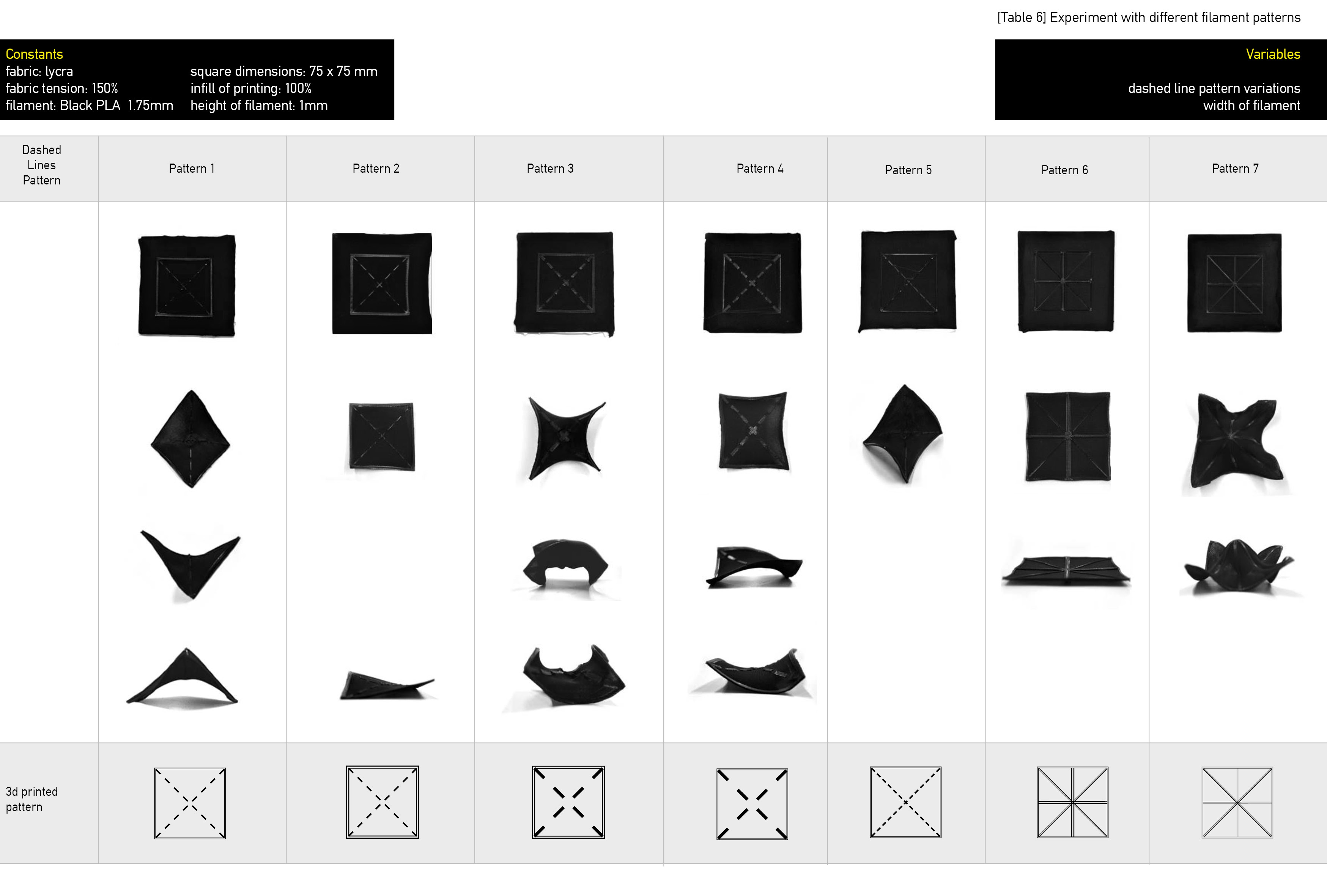
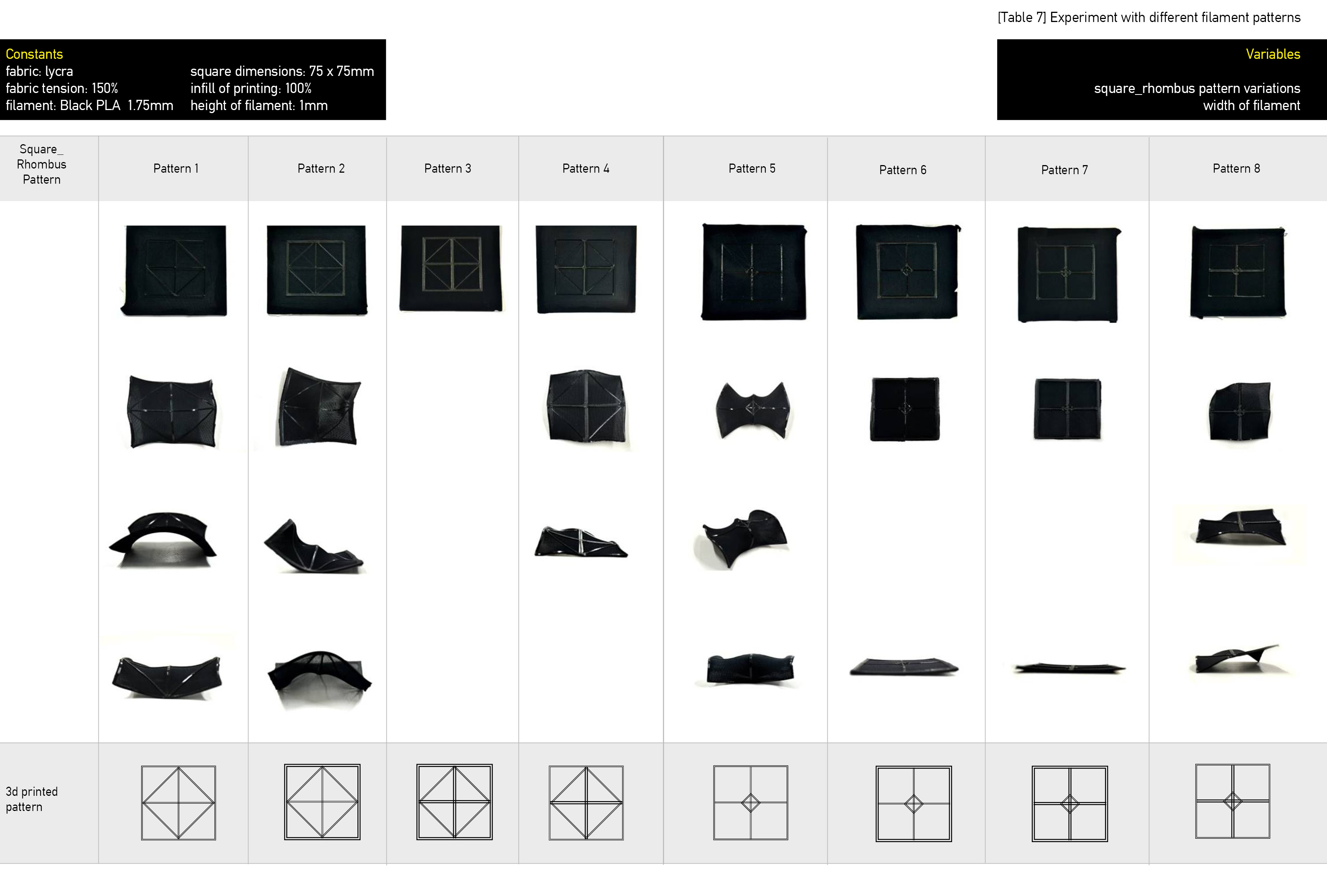
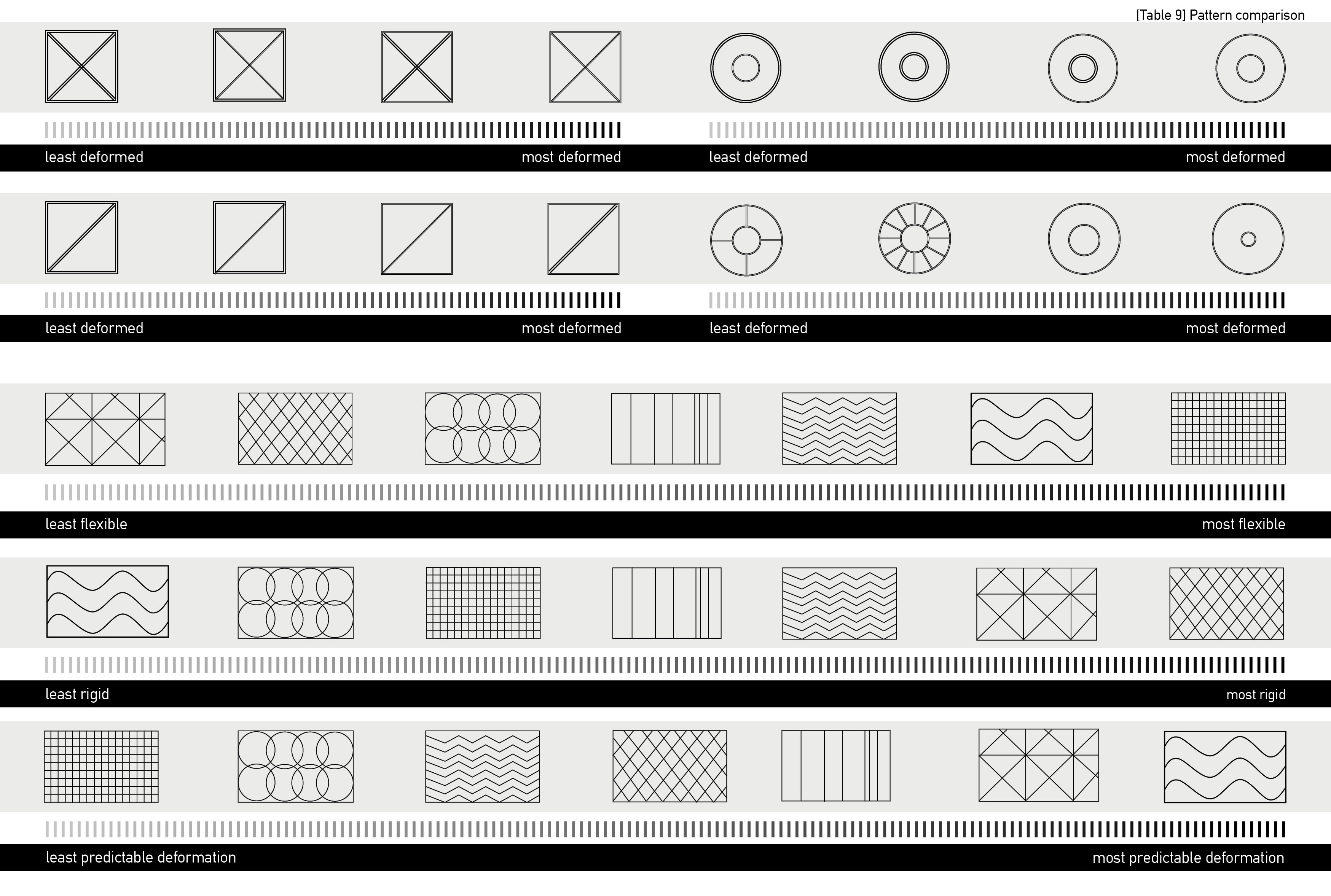
Deformation Principles

The next step of our research was to define a way to enlarge our structures. The PLA filament we mainly used for the 3d-printing is a typical thermoplastic material, meaning that becomes pliable or moldable above a specific temperature and solidifies upon cooling. This way, when the prototypes are heated the printed pattern becomes less stiff and at the same time the forces of the stretching of the fabric prevail and the deformation becomes more intense. Except if an external force is applied, the pattern becomes stiff again when cooled in a new position. The exploration of pattern deformations onto prestretched textiles revealed the potentiality of the 3d Printing Research in terms of application procedure and derformation control, as well as the need to be redifined in a larger scale. Thus, our research focus shifted to alternating material deposition and application procedure, taking into consideration the intended behaviour of our project, which is based on materials and systems that change stiffness and in that way deform fabric structures.
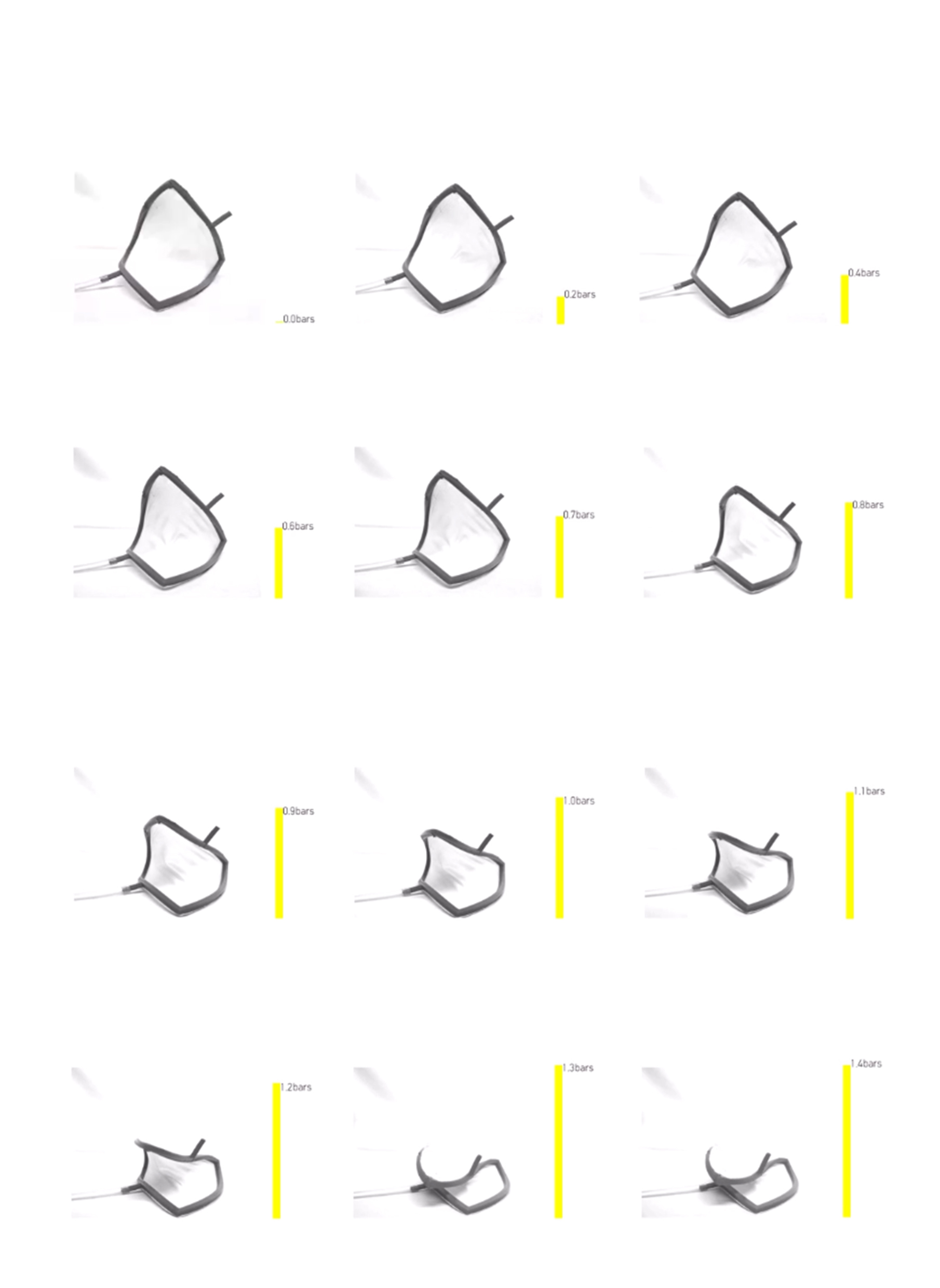
Depositng flexible filament on prestretched fabric frames and, at the same time, adding actuating parameters apart from fabric pretension. enabled us to scale up and enhance the deforming patterns exploration. Inserting air in tube patterns, similar to the two dimensional patterns explored and controlling the occuring deformations became our research objective, as it would augment the deformed patterns that were tested during the 3d Printing Research of our project. As air flow enables tube stiffness change, we experimented with air importation in tube networks on prestreched fabric.
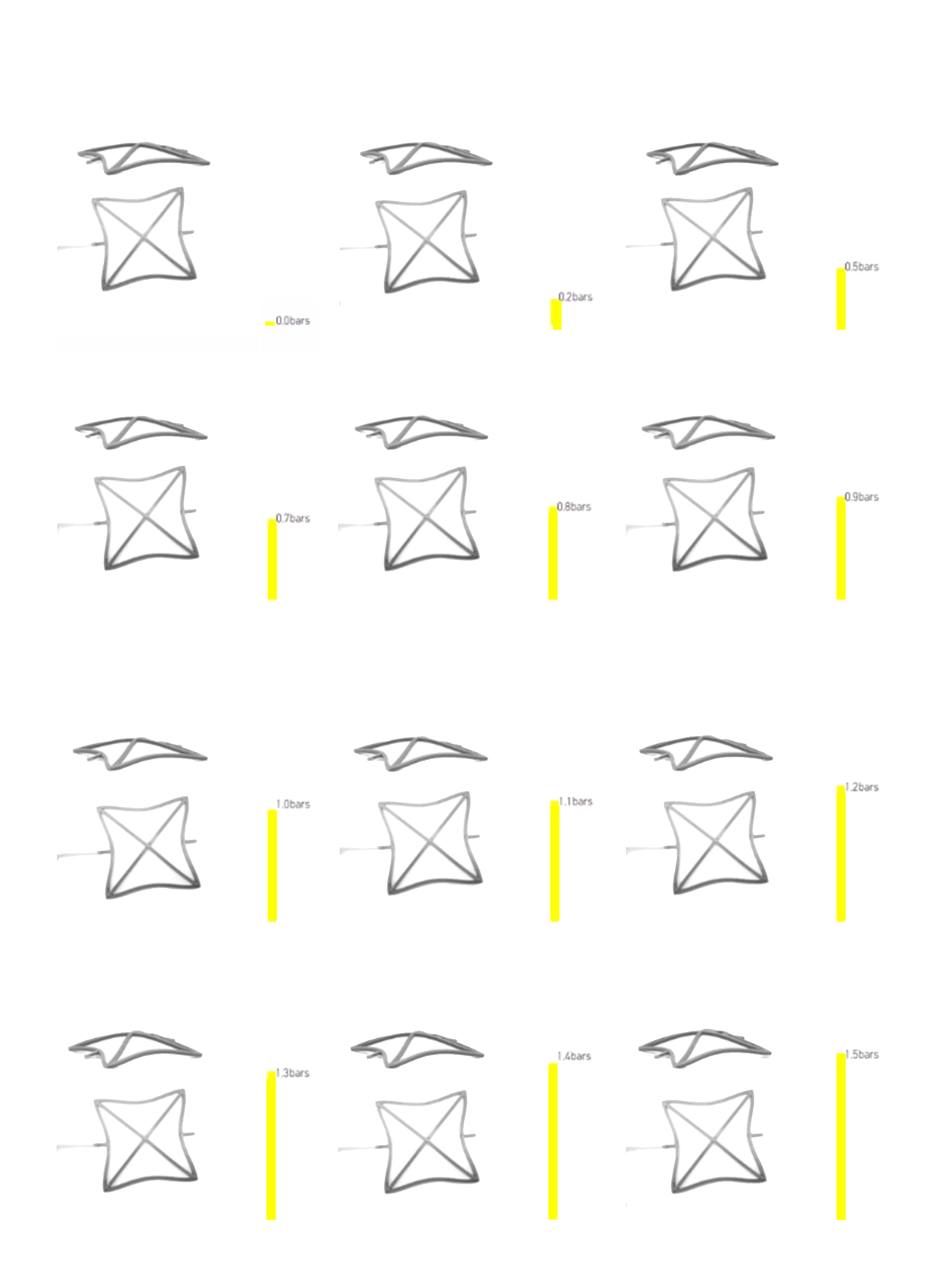
Square Particle Deformation

Square Particle Deformation _ One Diagonal

Square Particle Deformation _ Two Diagonals

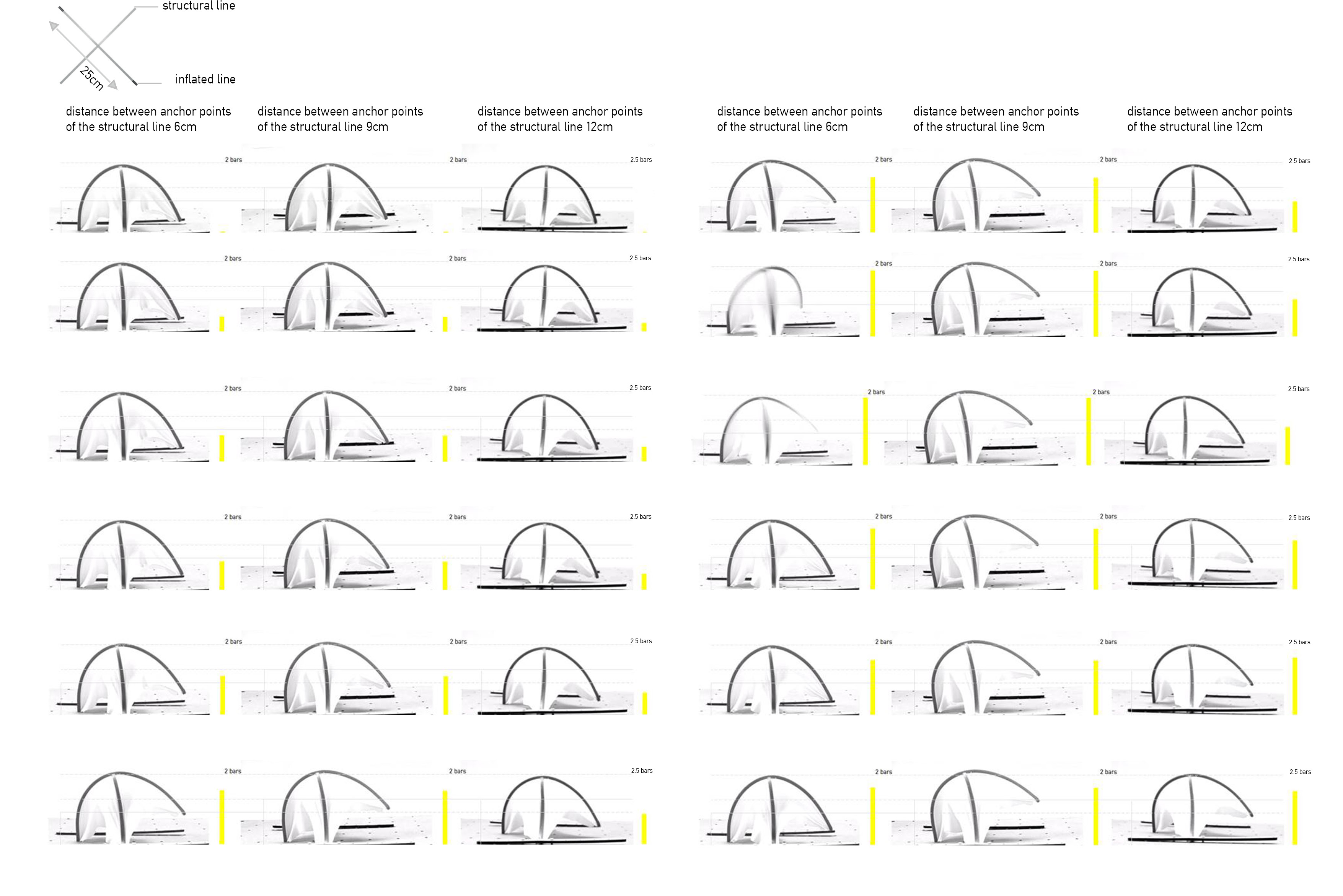
Anchored Particle _ Variation of Anchor Points Distance
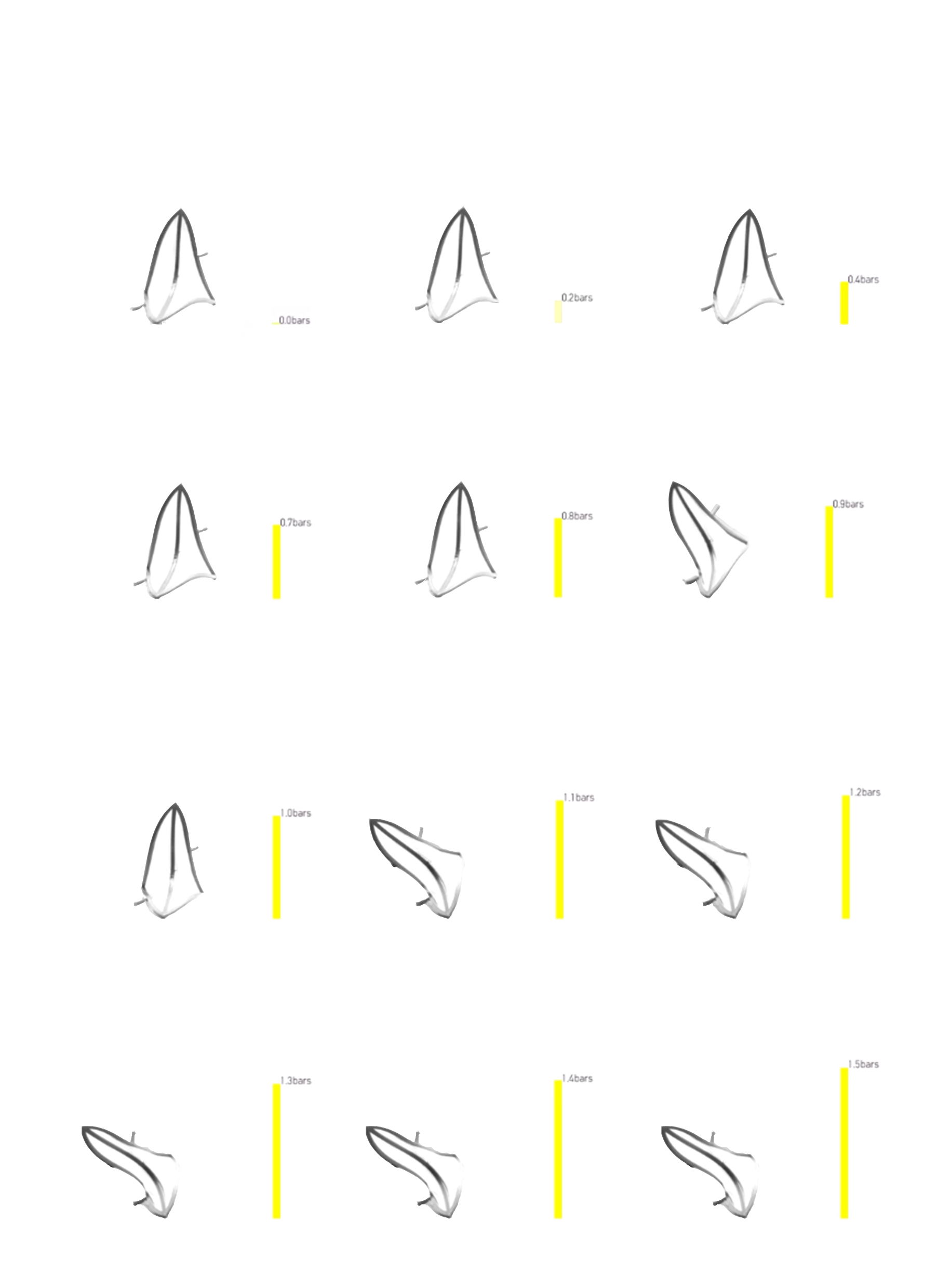
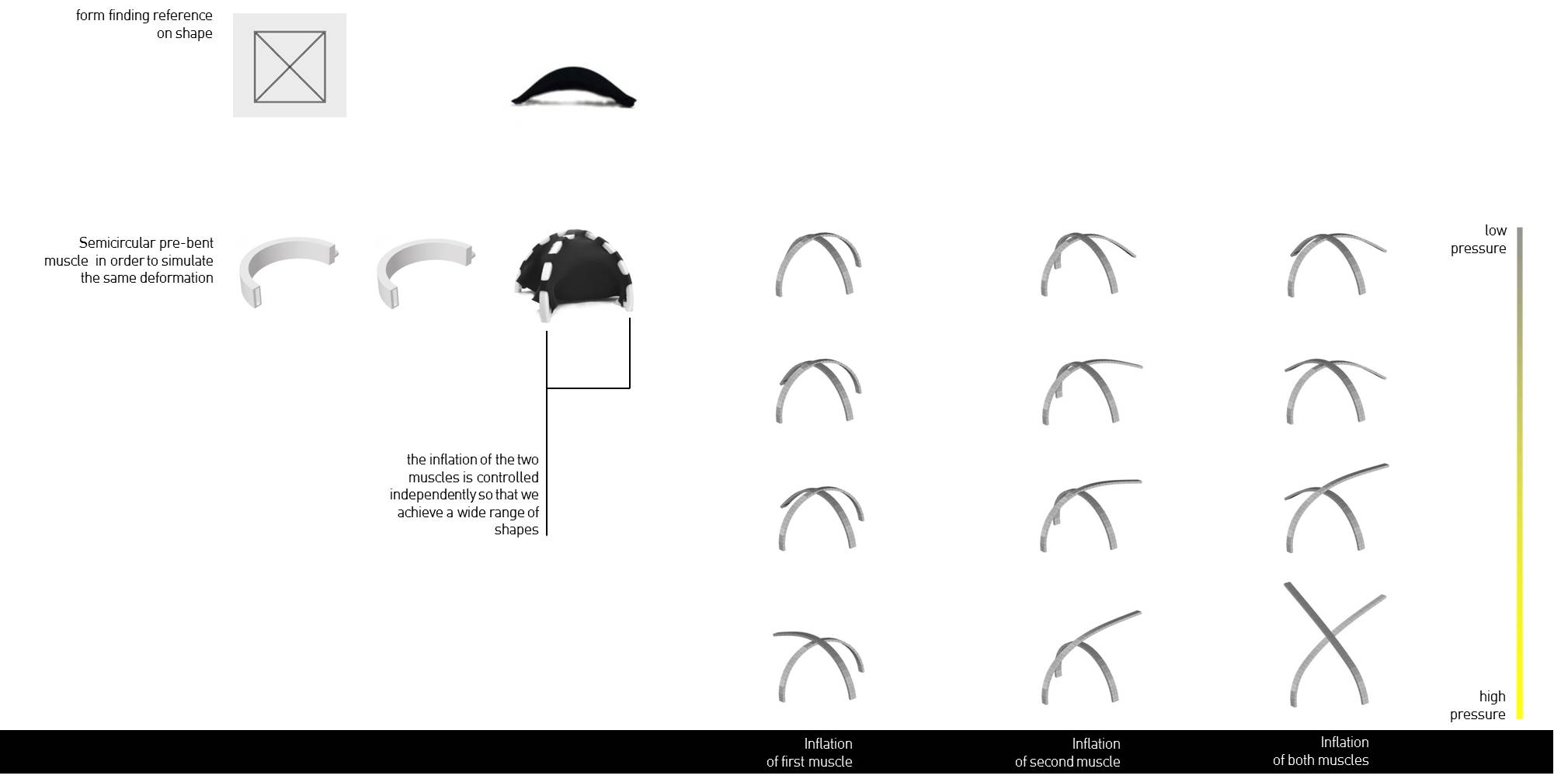
The last stage of our research focused on studying and printing pneumatic artificial muscles, as well as the means in which the can be implented in the deforming fabric structures. Air flow insertion on 3d Printed Patterned Tubes showed the capability of stiffness change on our experiments and more importantly the ability to enhace deformation state range. However, as a mean of stiffness change it proved to be limiting in terms in controling and stabilizing the deformed fabric patterns. Subsequently, we considered using inflation instead of merely air passage, in order to provide a higher level of ruling on the deformation states of the patterns.
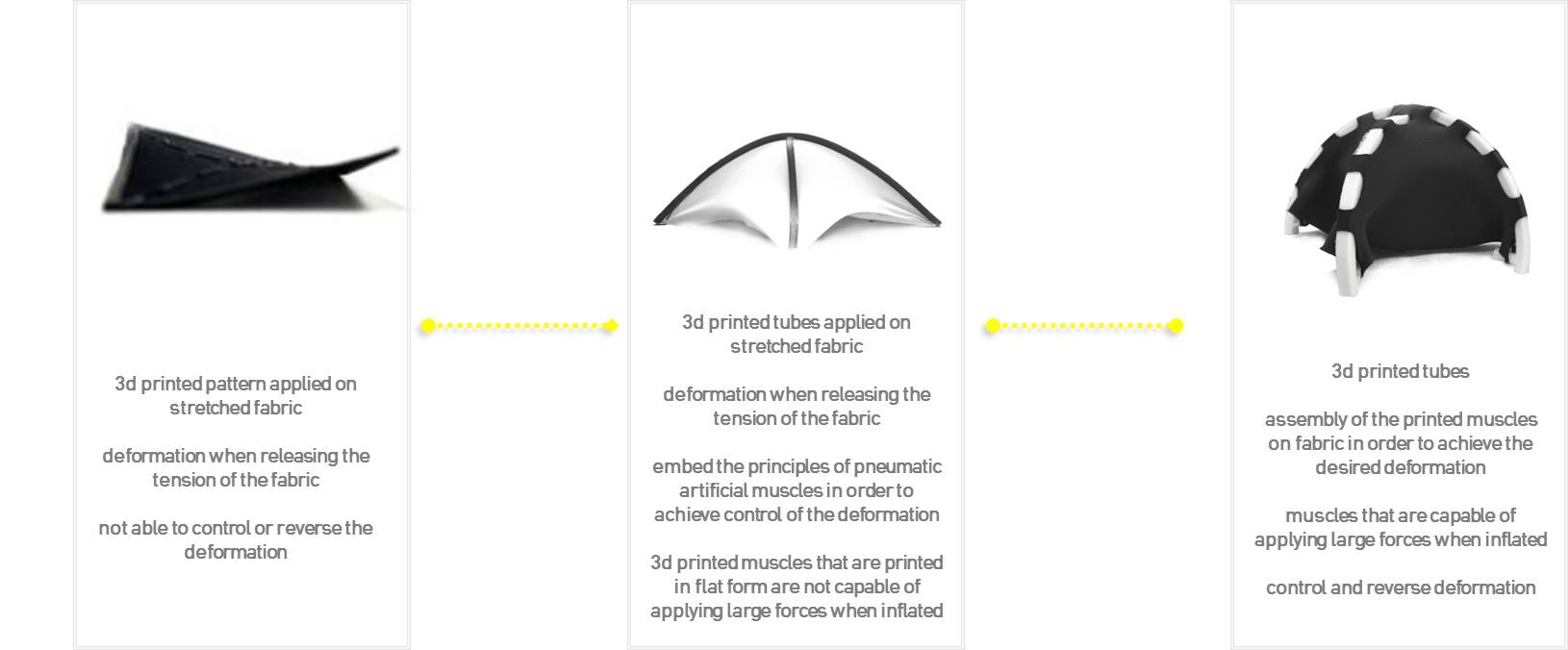
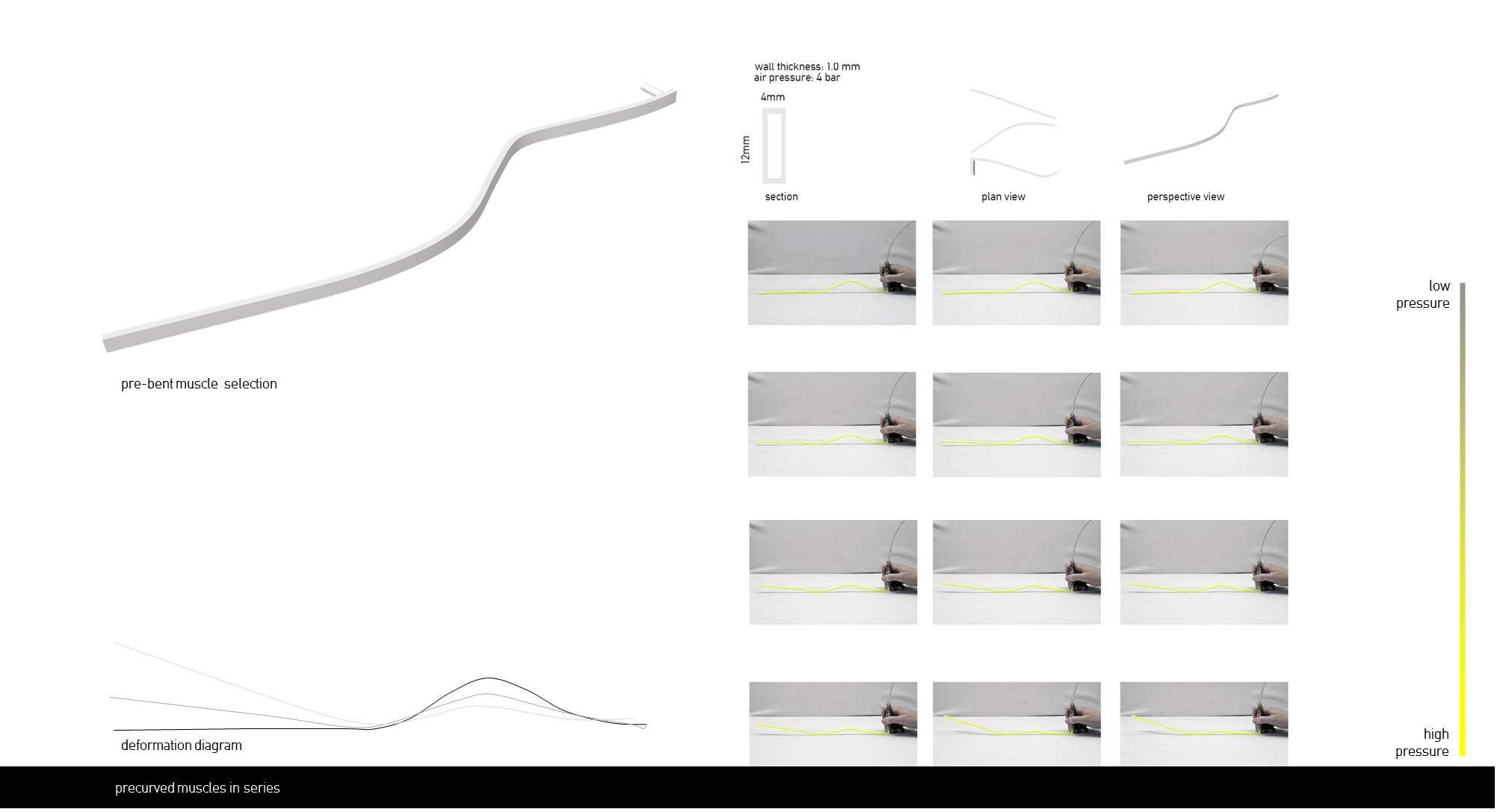
In this way, we started printing pneumatic artificial muscles, in order to study their function and principles, with the aim of embedding them on the process of stiffness change of patterned prestretched fabric. Testing various muscles and the parameters that control their behaviour enabled us to provide more control on the occuring deformed geometries on prestretched fabrics. Along with this research, we tested prefabricated silicone tubes and ways in which we can simulate artificial muscles principles and their inflation movent, so that we could test the scalability of our research.
Basic Artificial Muscles Deformation Experiments

Fabric Implementation
Free Form Curved Muscles
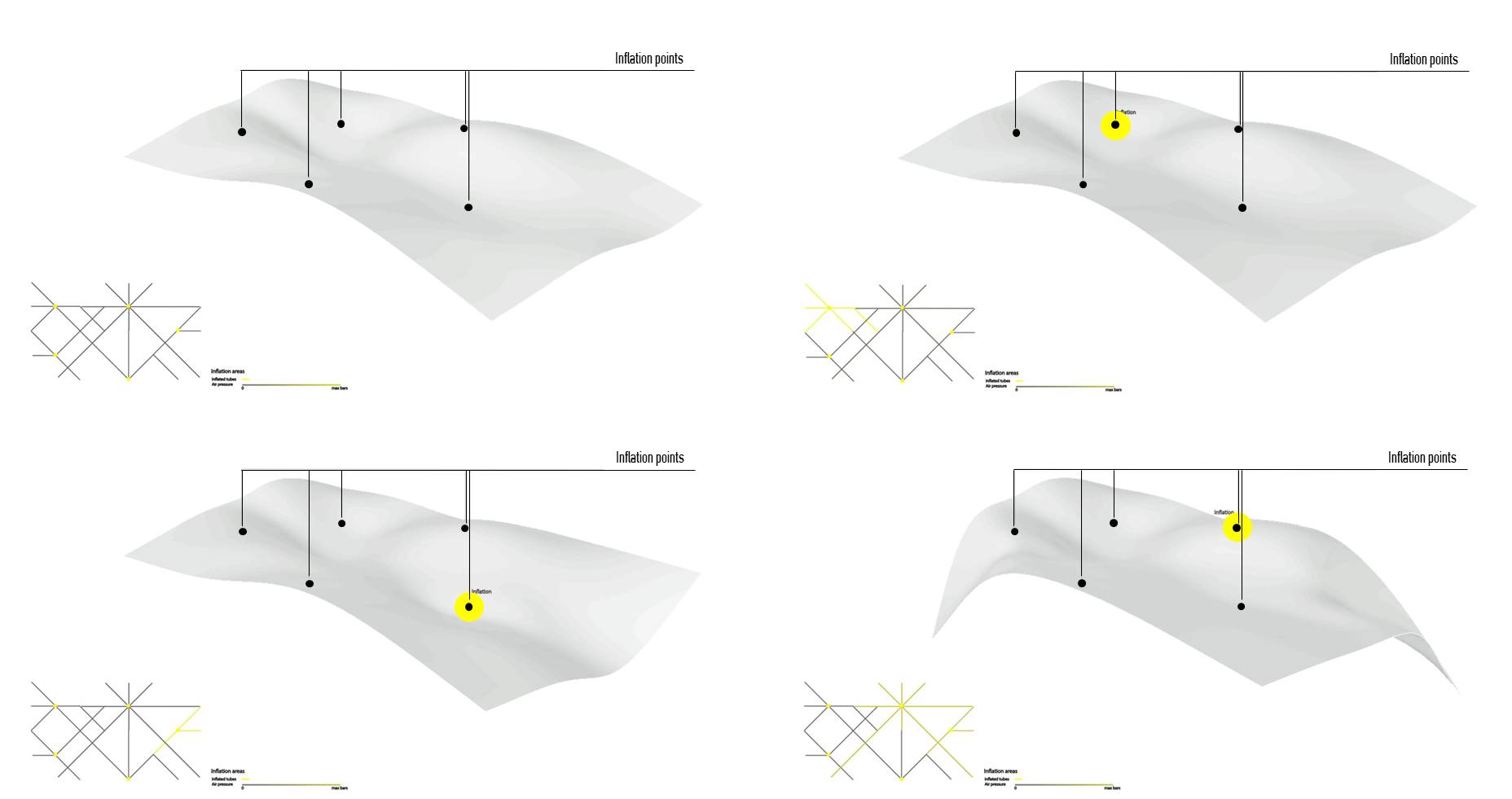
Inflated 3D Printed Tubes Deformation Princliples
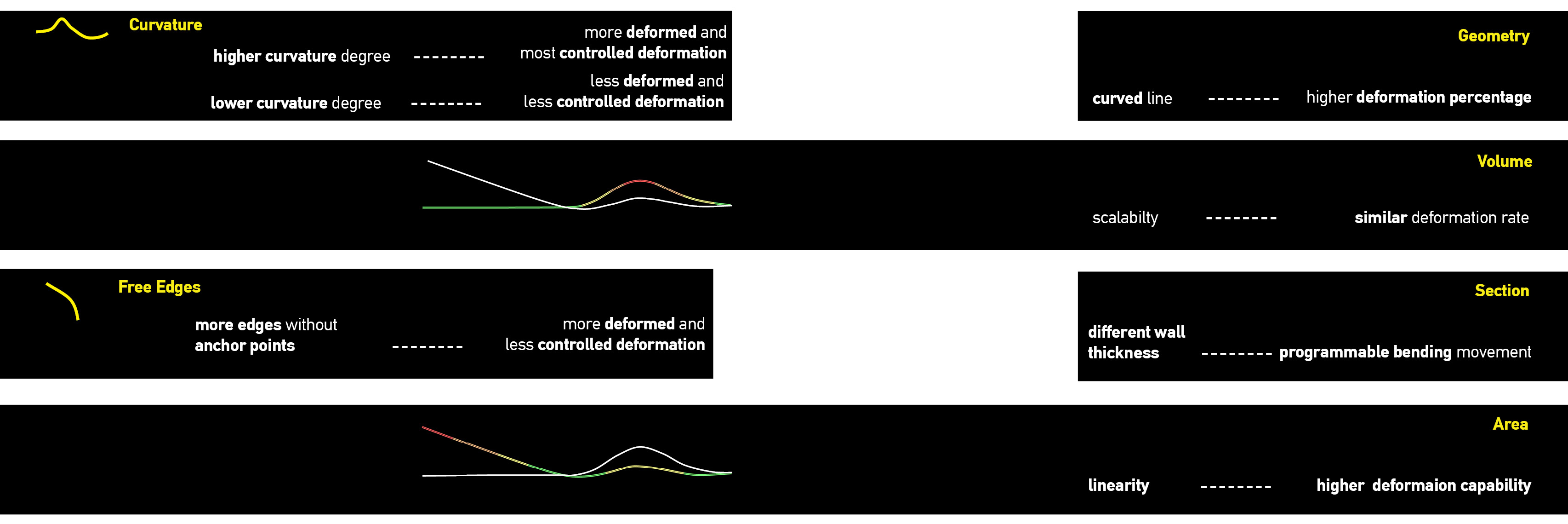
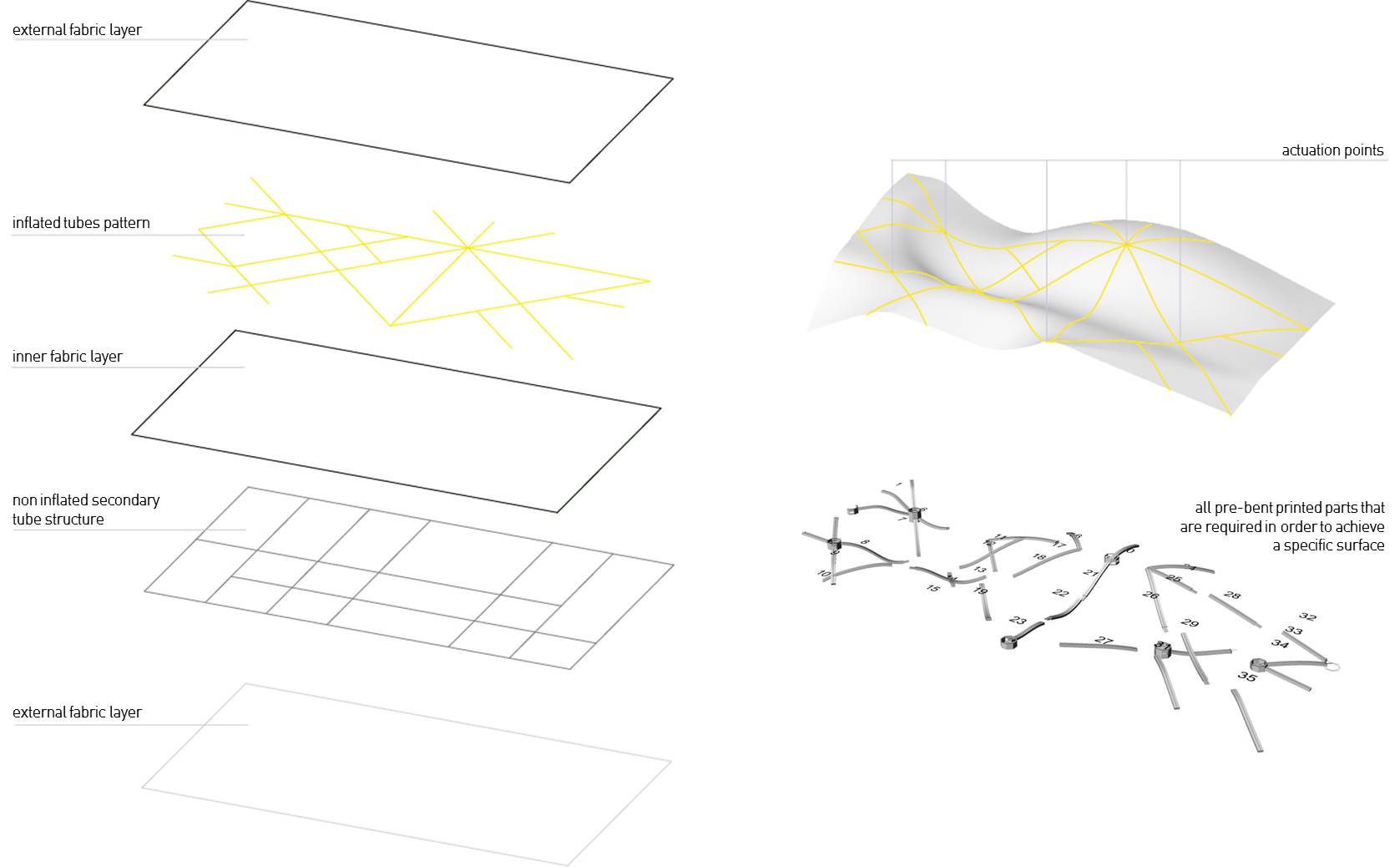
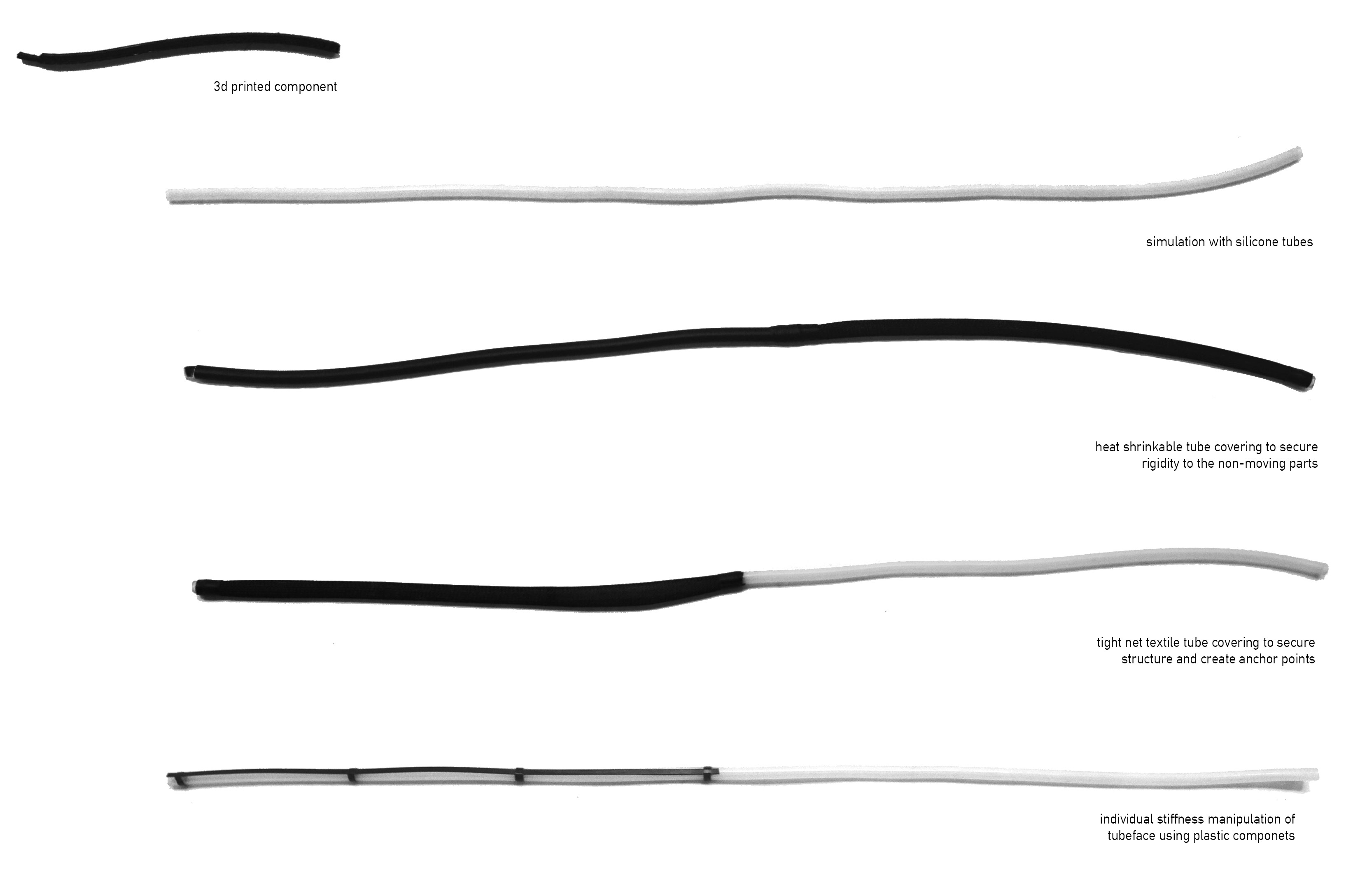
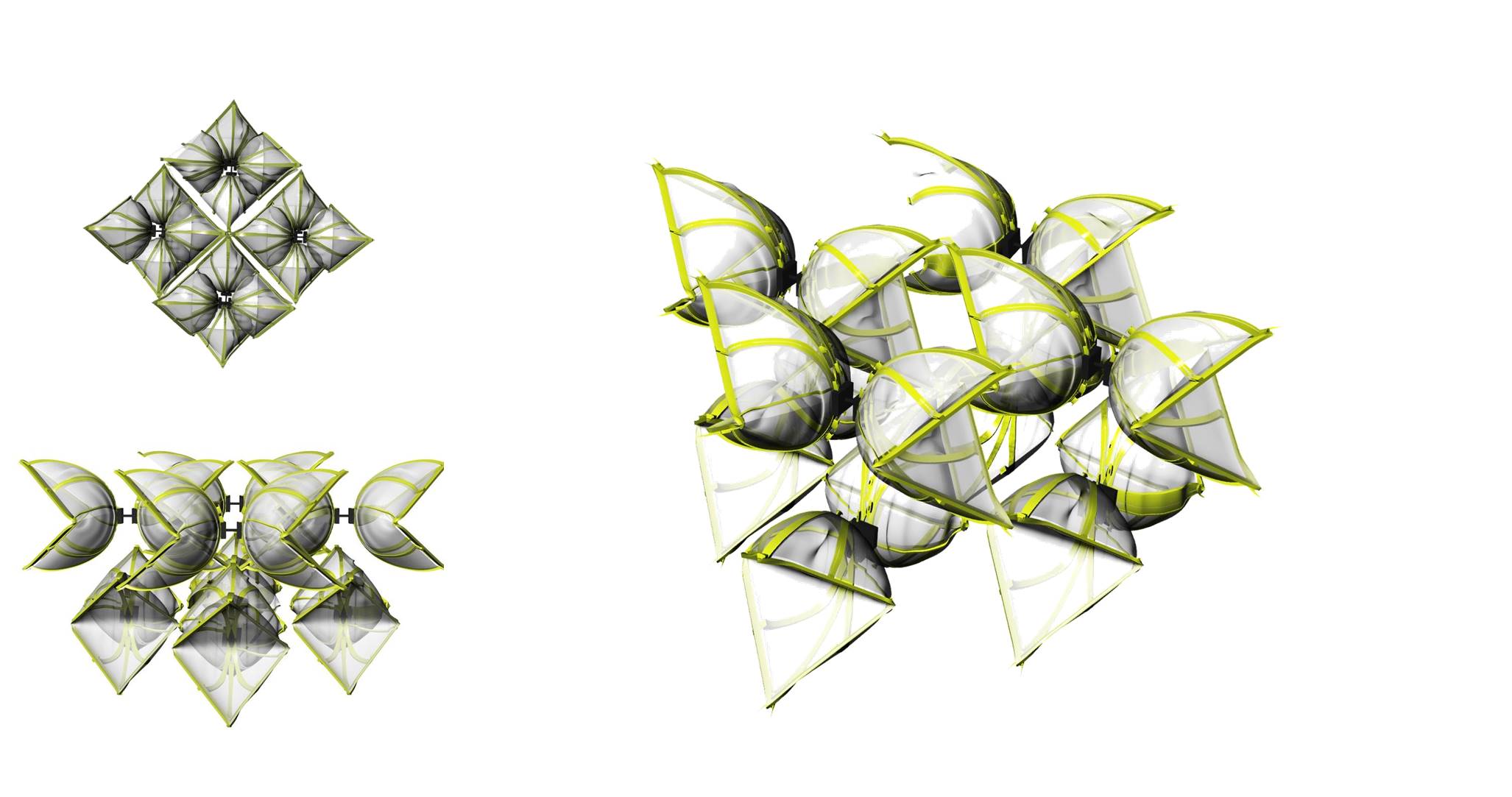
Considering the expriments of various 3d Printed Artificial Muscles, it became evident that prebended shapes that are inflated have the highest percentage of deformation. The bending movement can be controlled by individual manipulation of the muscles side thicknesses, as well as by their geometry. In that way, for designing our performative prototype, we chose the most deforming arificial muscles -those printed in a curved shape- in combination with the most deforming patterns on prestretched materials. Compiling the above in linear, two dimensional and three dimensional ways, we finalized our prototype design. Thus, we designed two performative prototypes, one that is based on a 3d printed tube structure, and a close up of part of it in real scale, using the silicone tubes. These prototypes generate various curvature forms that can have multiple applications as linear objects, surfaces and spaces.
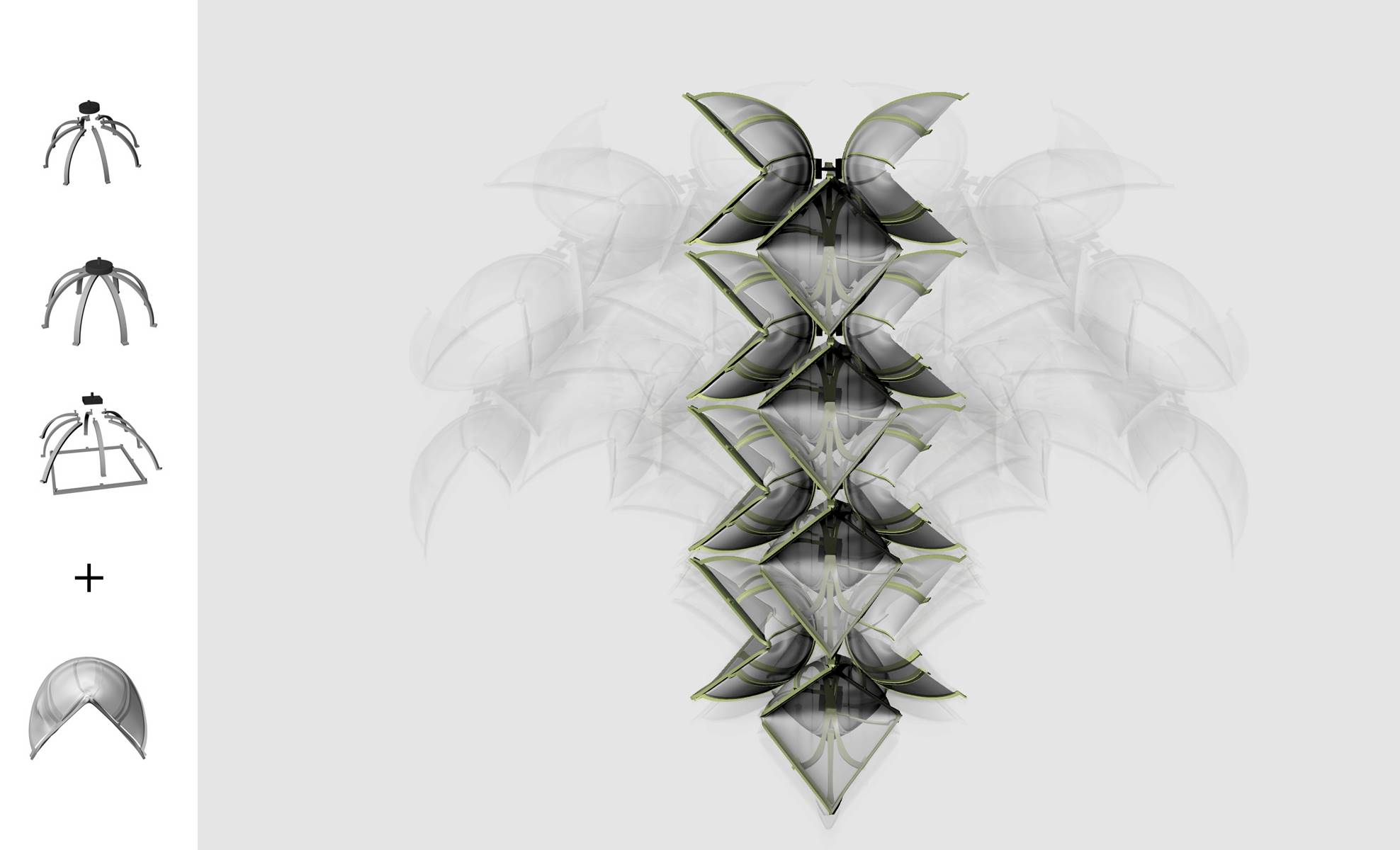
3d Printed Prototype Tube Structure
3d Printed Prototype Tube Structure _ Actuating Moments
3d Printed Prototype Tube Structure _Multiple Actuating System

Scale Up _ Silicone Tubes Pattern Fabrication
Muscle Simulation using Siicone Tubes
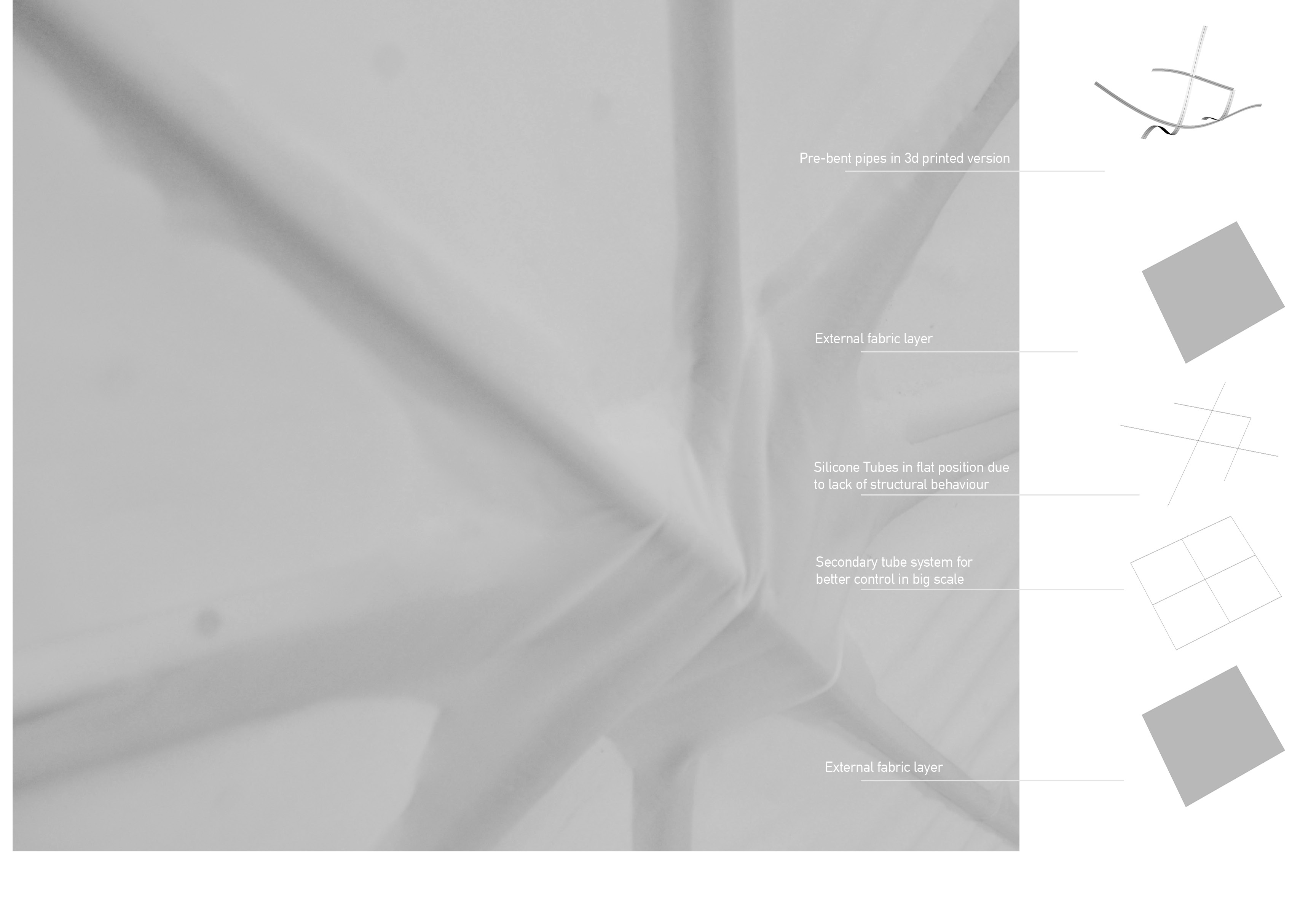
3d Printed Prototype Tube Structure _ Components and Assembly

3d Printed Prototype Tube Structure _ Final Scale Up Prototype

Applications
Linear Formation _ Pattern Compilation
3dimensional Pattern Combinations

Space formations_Indicatory sections
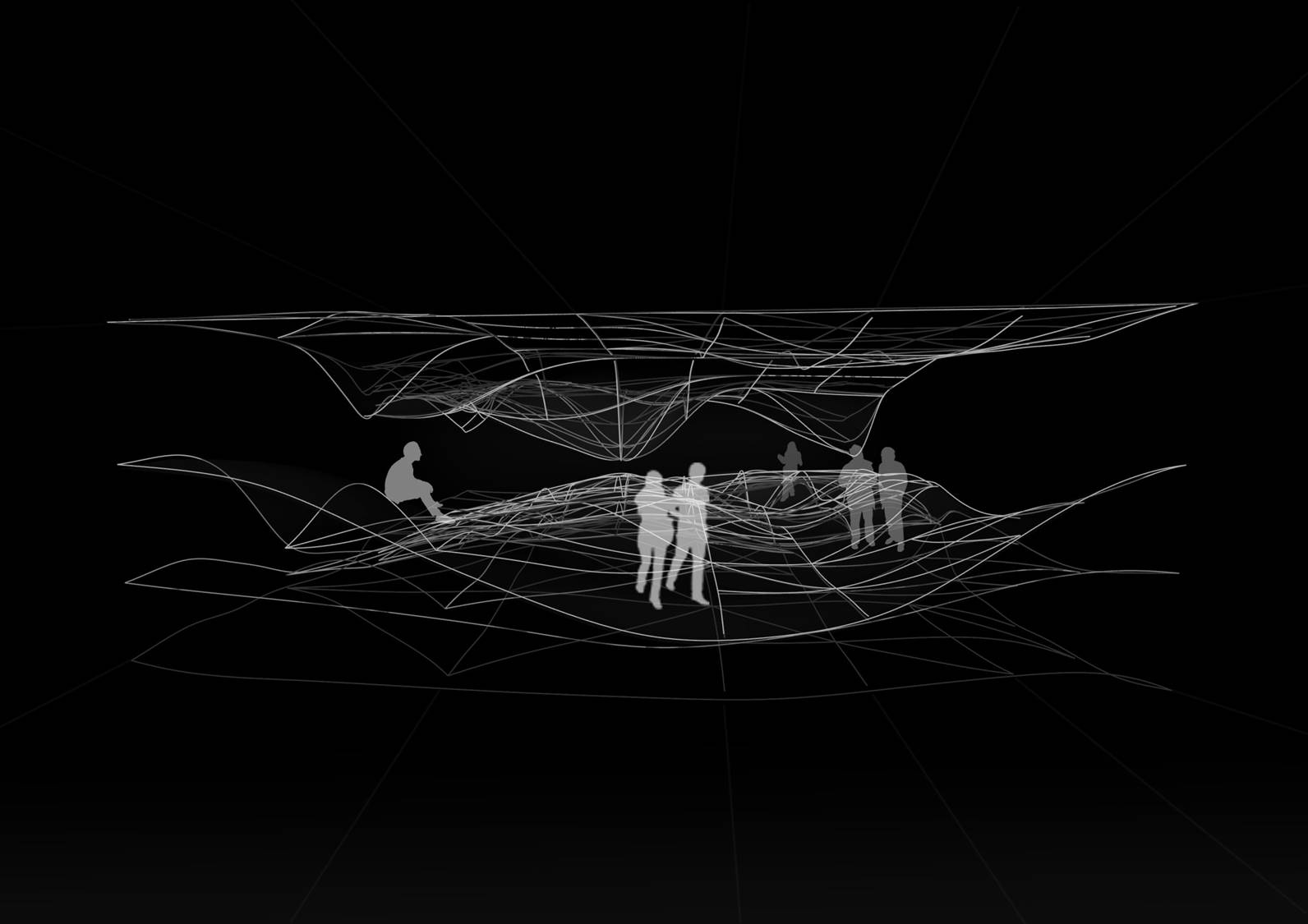
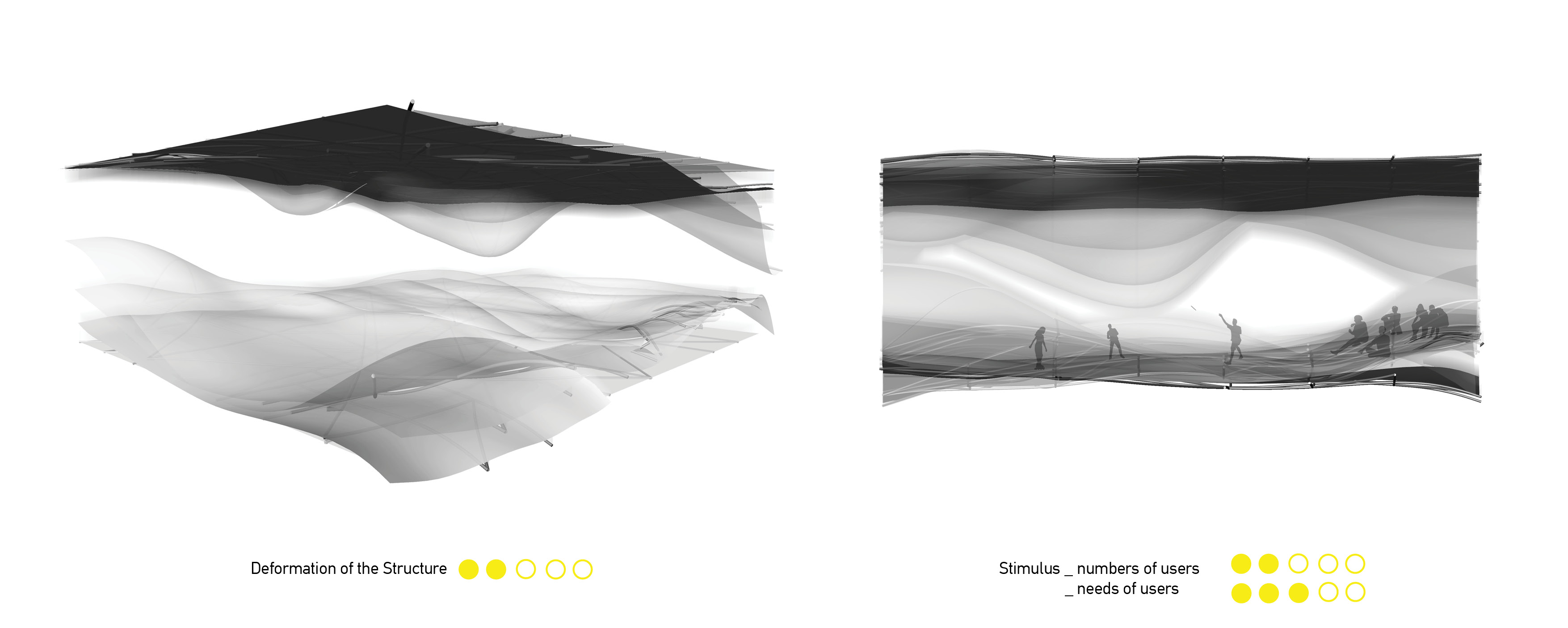
Space formations

Space Assembly Variations depending on User Stimuli