
P1015305 from rafael vargas on Vimeo.
P1015315 from rafael vargas on Vimeo.
Glove osc Update from rafael vargas on Vimeo.
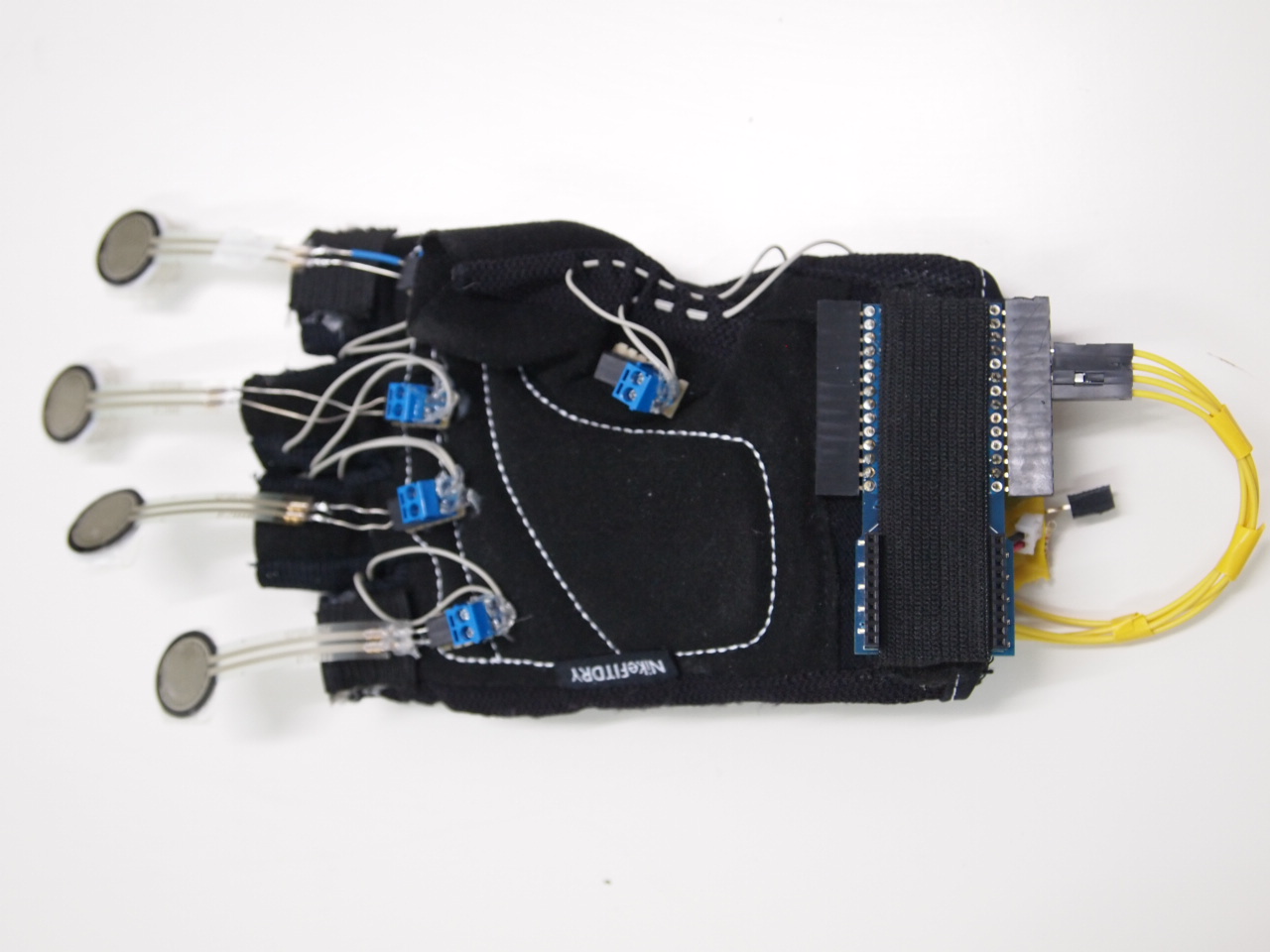
The drum gloves comes from the idea of converting movements and sounds from physical and electronic instruments into a portable ‘surface free’ sound producer. Instead of hitting a specific surface with your fingers that outcomes in some type of sound, the drum gloves will provide you with surfaces will be on your fingers. The concept is that when you wear the gloves, you can hit any surface and produce midi signals that can be sent to your mobile phone, tablet or computer and use any virtual instrument. Assign some instruments and start playing.
Changes made for the final
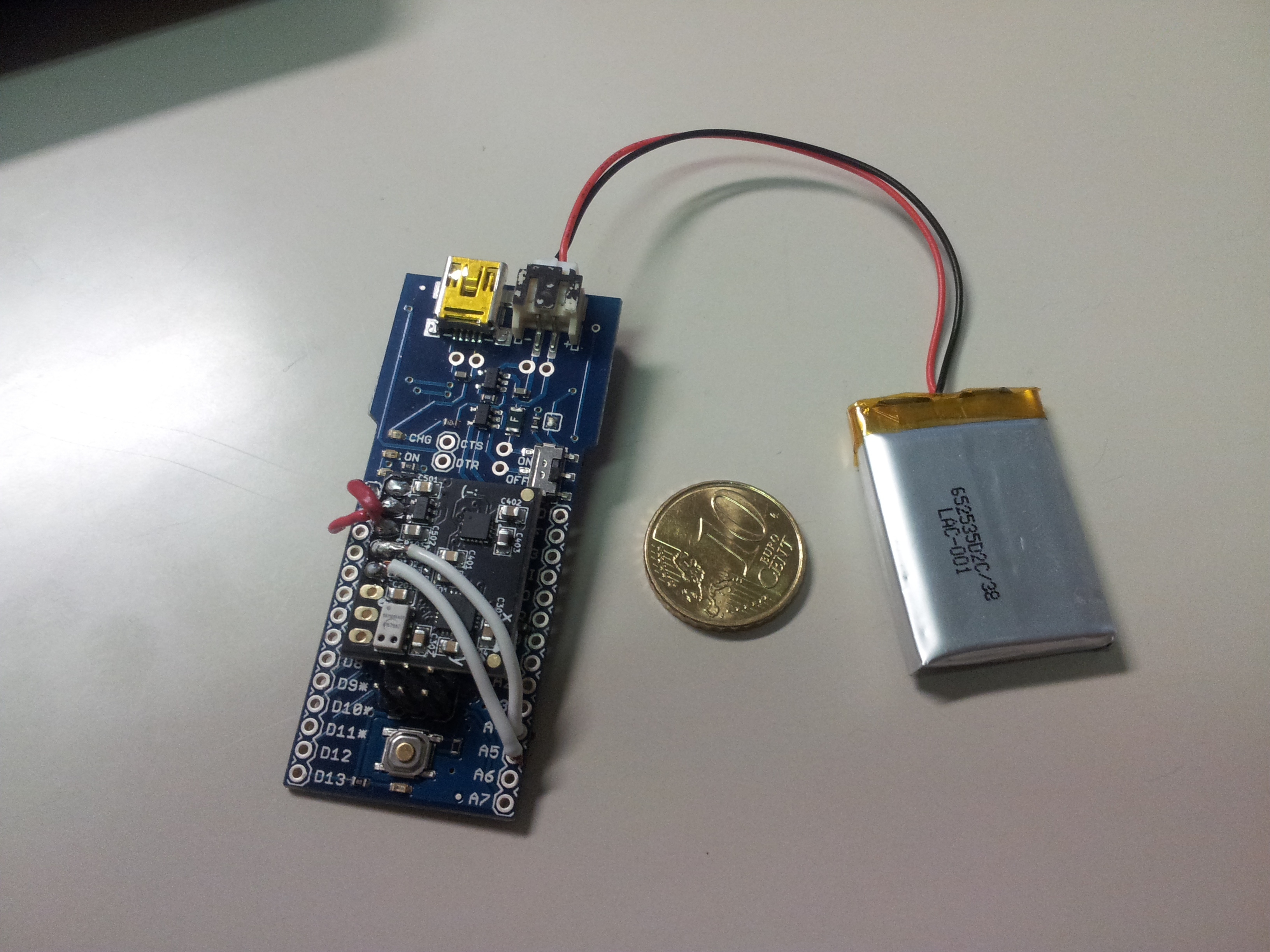
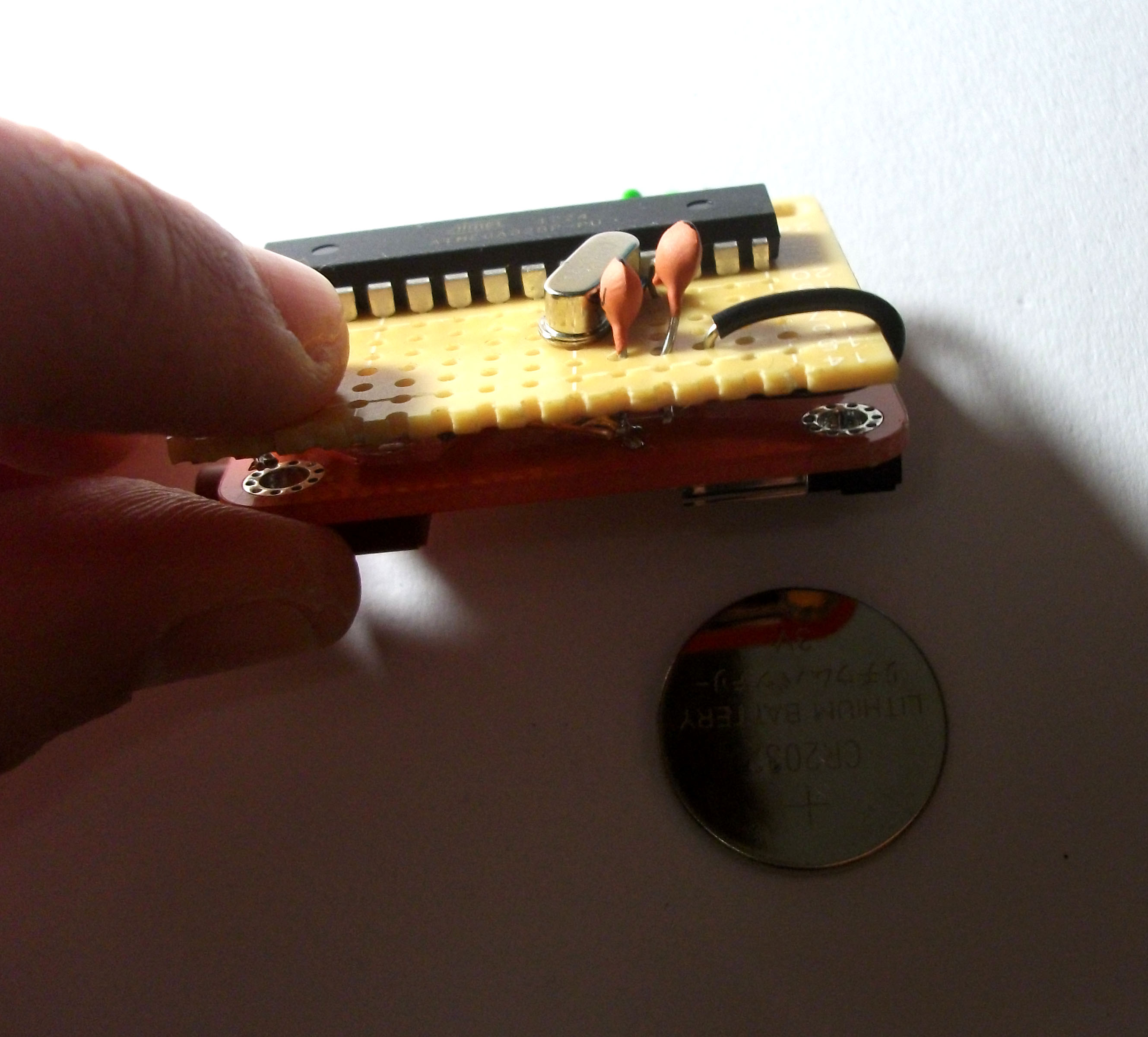
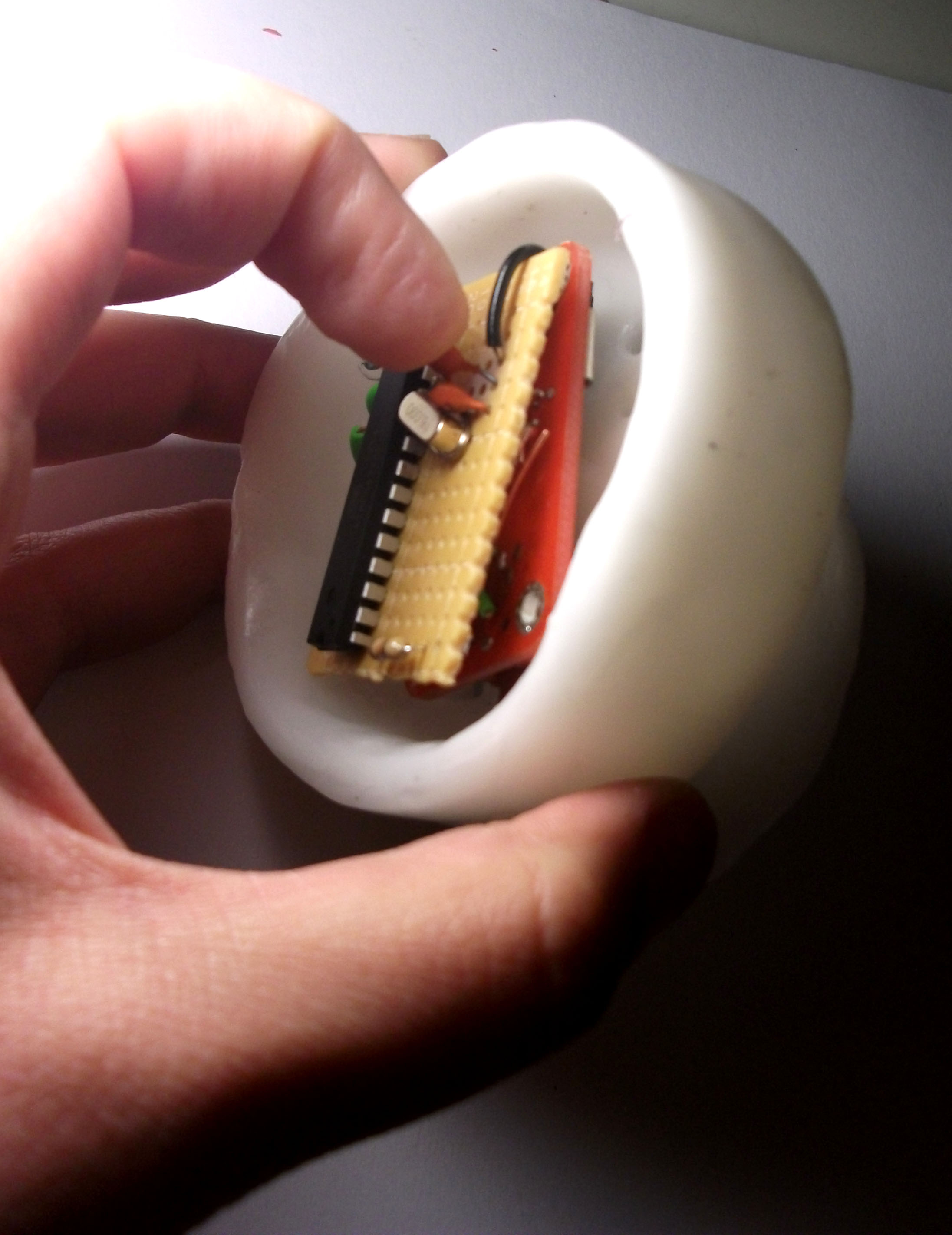
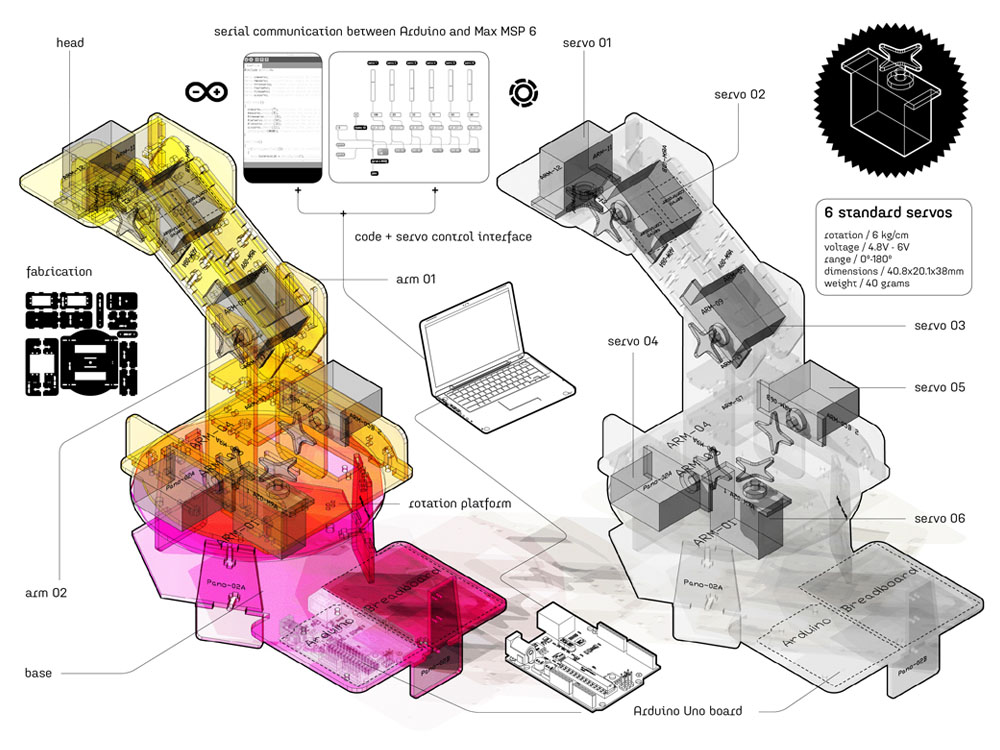
Smaller components were needed. Also to get rid of the cable that goes to the computer. Arduino Fio solves those problems. It’s small and you can connect a 3v lithium battery to it. The wi-fly adds the capability of communication via Osc Protocols with any device that can handle it: Computers, tablets, mobiles. . .

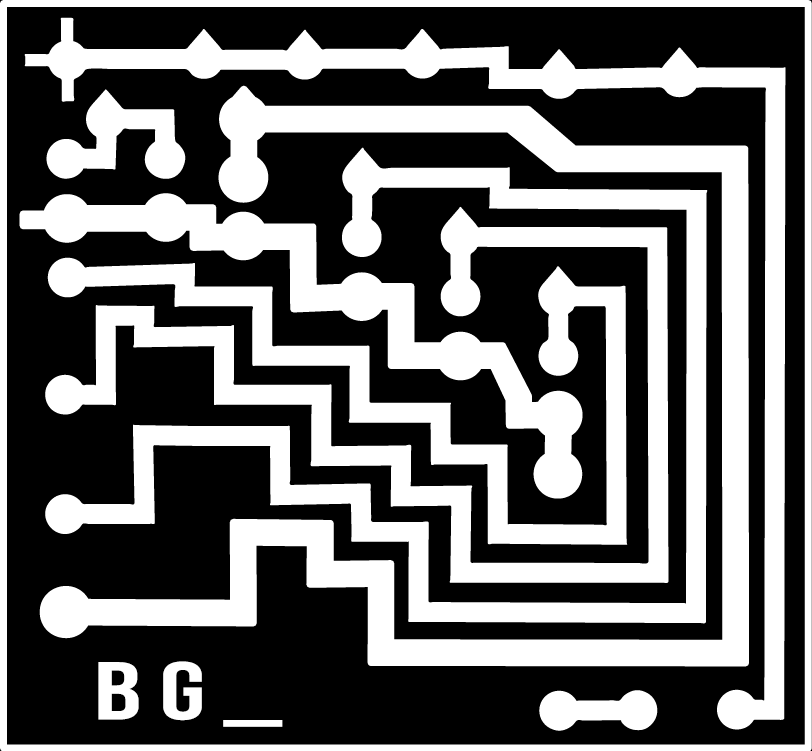
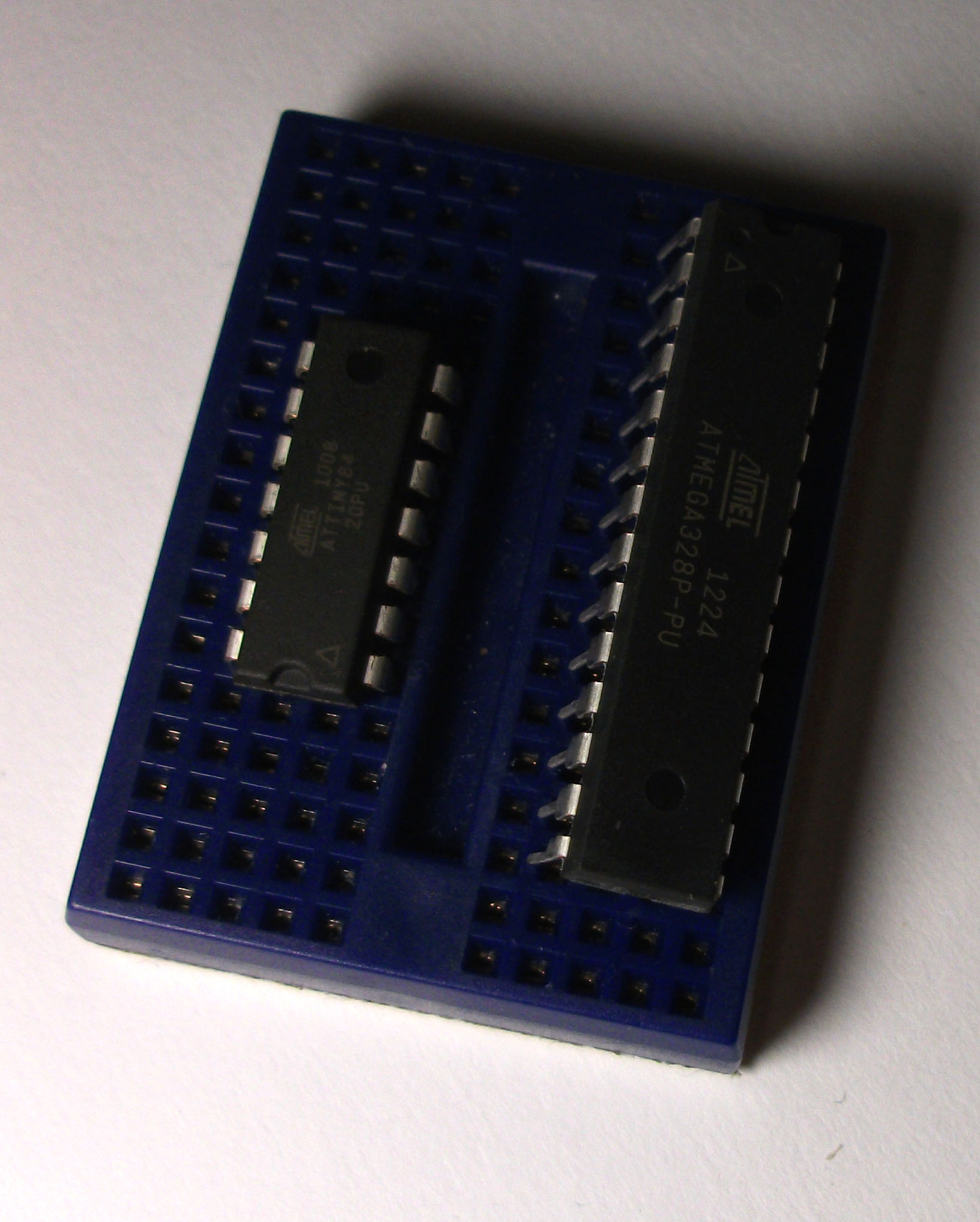
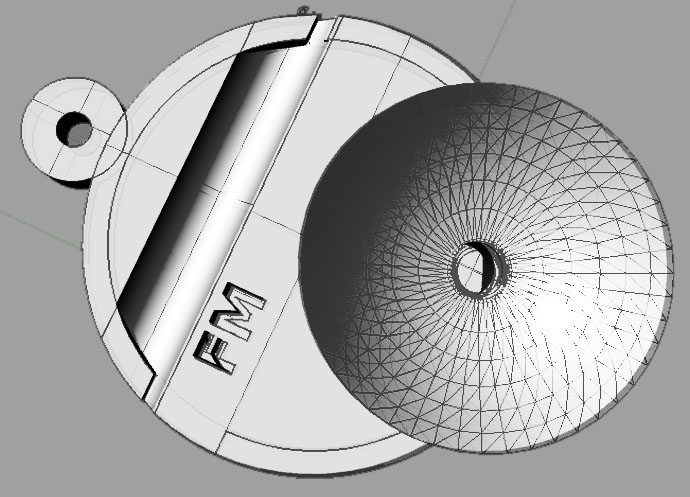
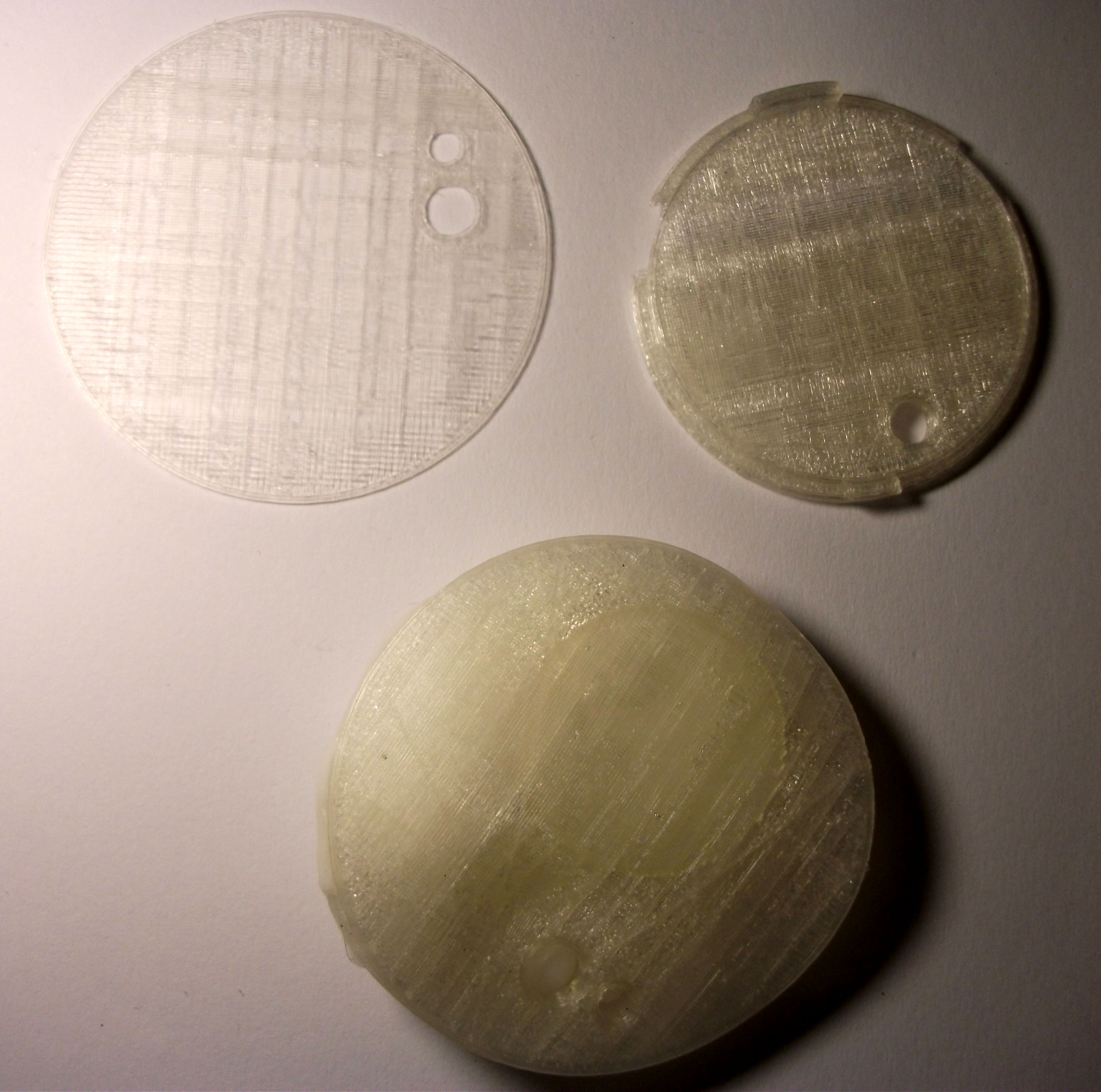
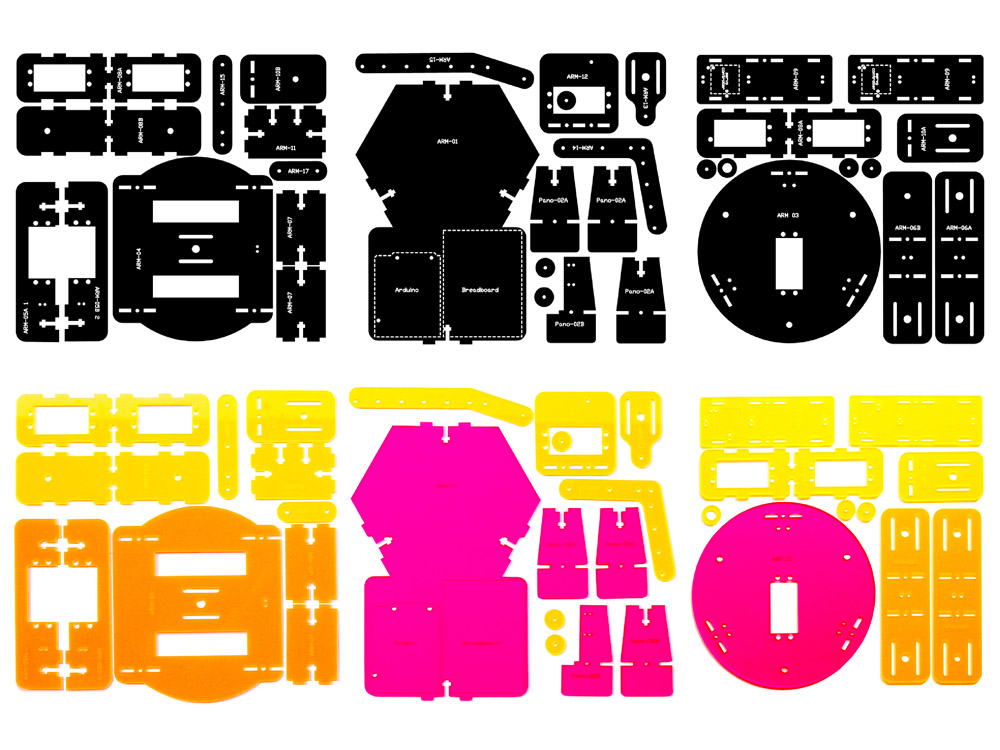
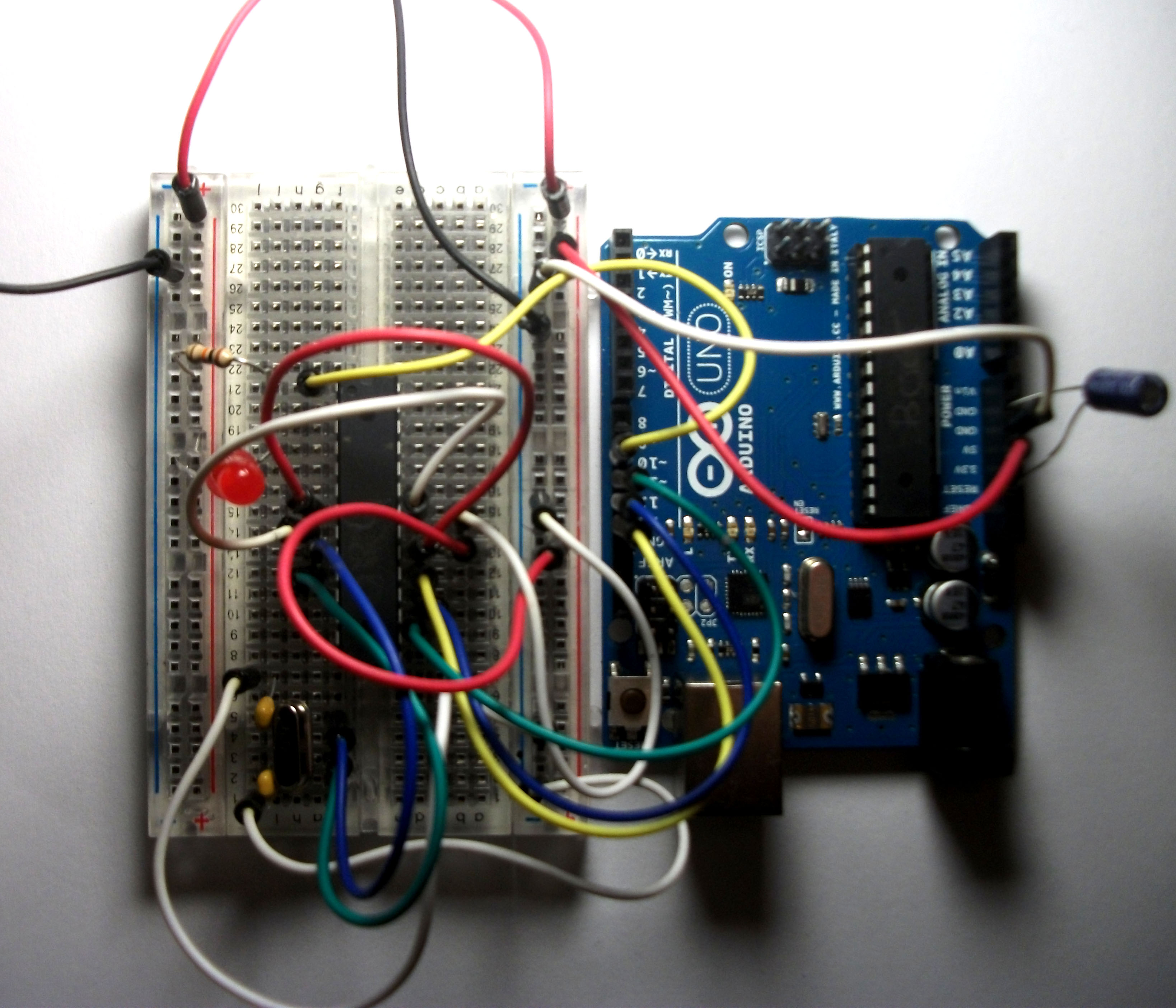
Now, this time the prototype needed a smaller circuit board because the glove is smaller. A custom circuit board was milled @ the fablab for that.

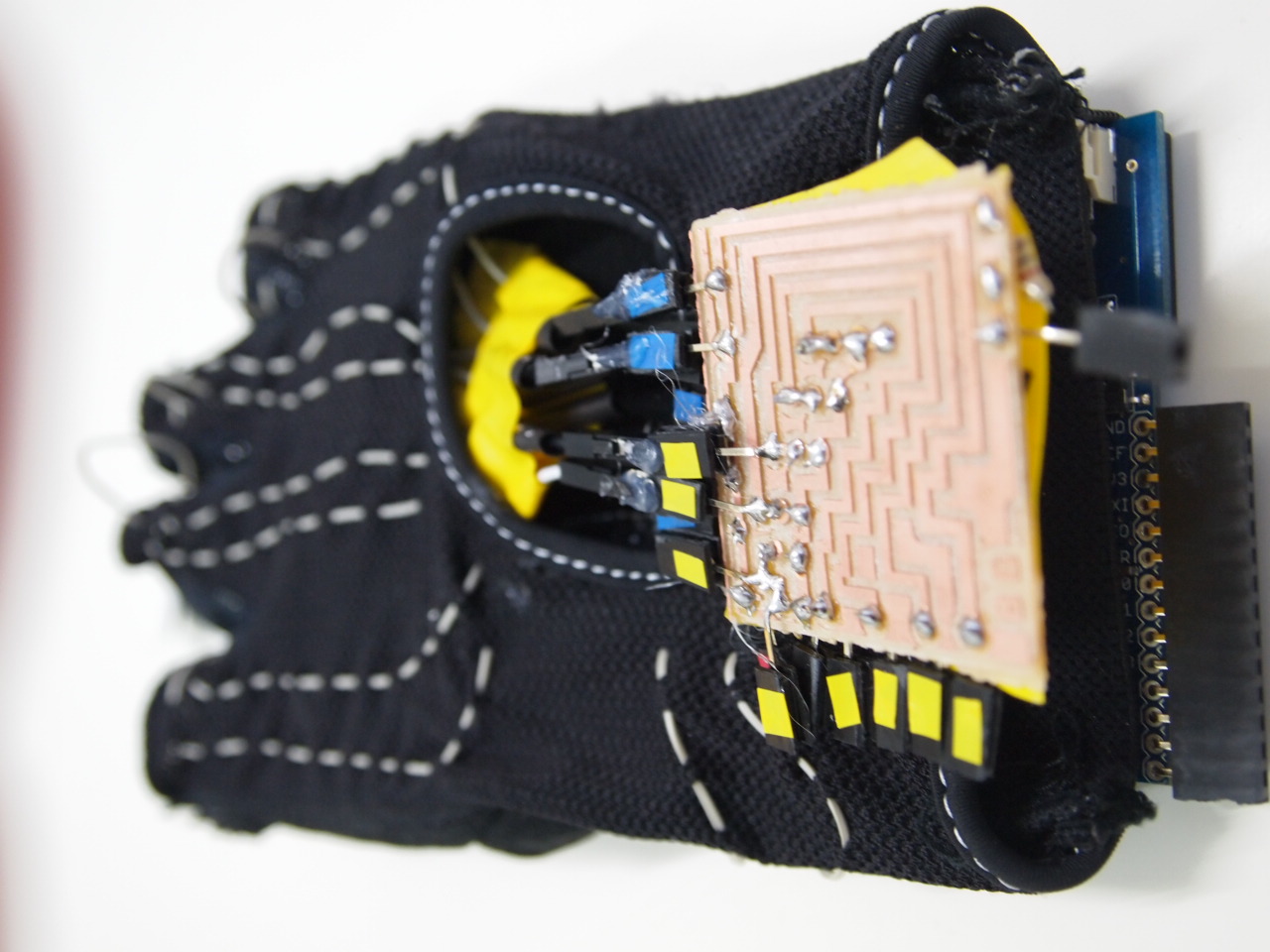

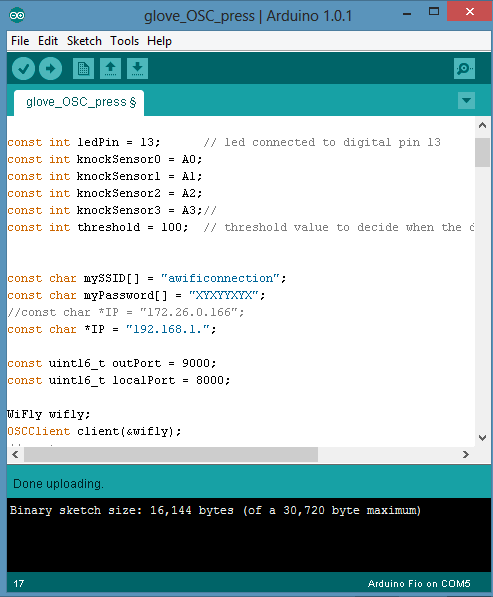
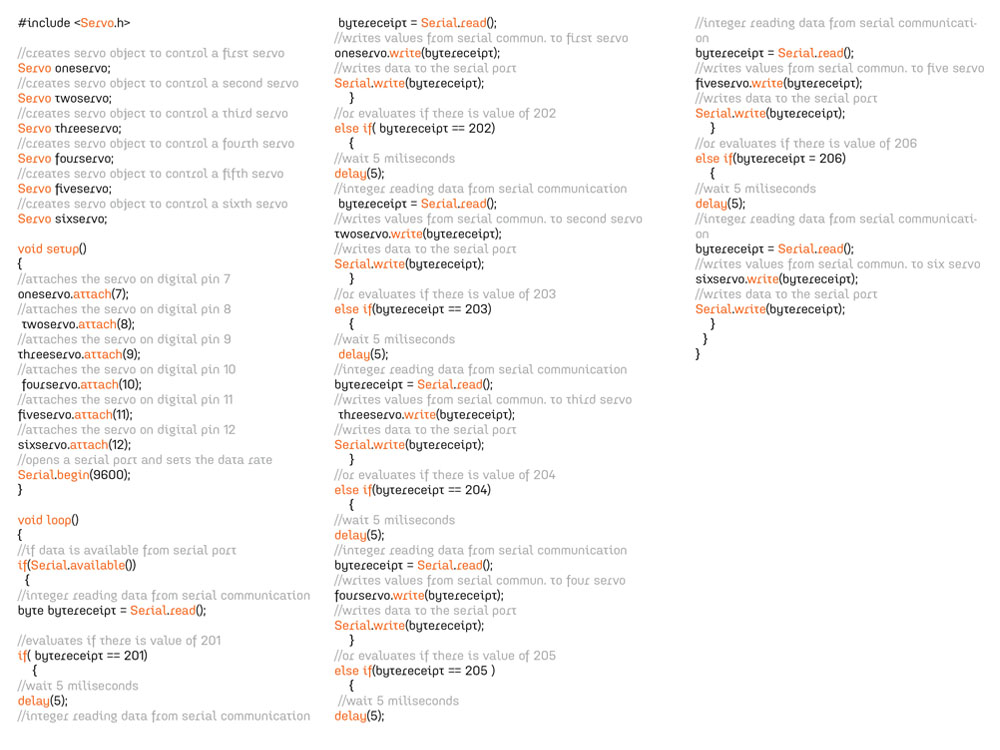
The code got a lot more complicated than with the waveshield. Osc packets had to be send via wifi using the ip addres of the device that was going to be targeted. To test messages were sent to max msp. These messages had to be activated by the pressure in the finger sensors.









{kind=link}