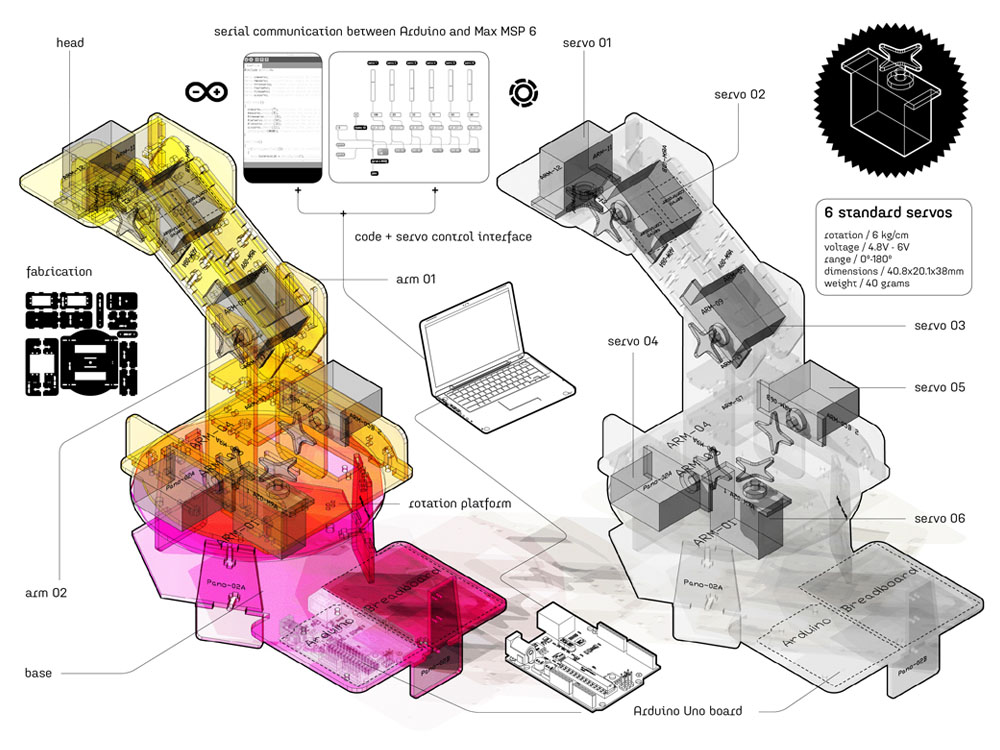
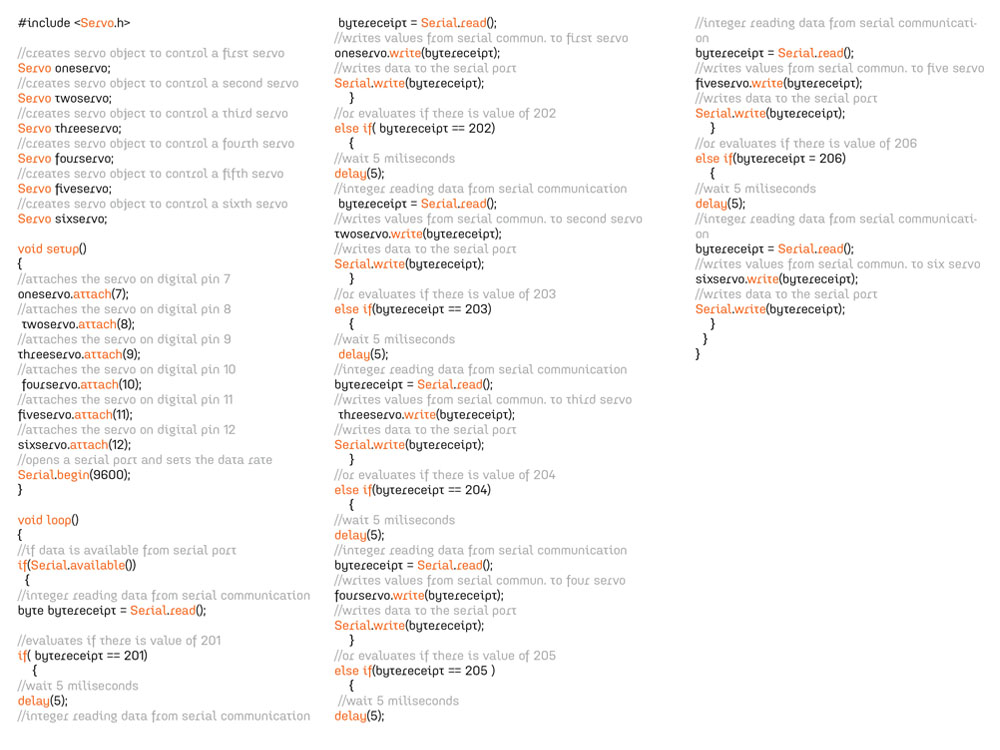
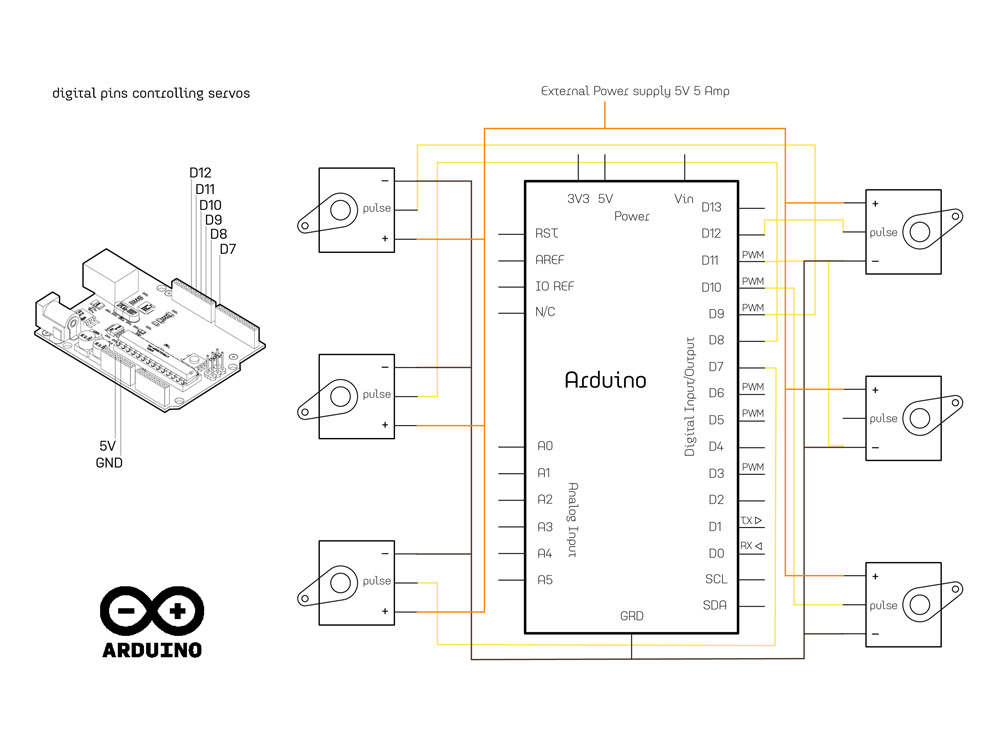
For my final project of physical computing I decided to build a robotic arm, controlled by
six standard-sized servo motors. The idea was to control servos of the robotic arm with an
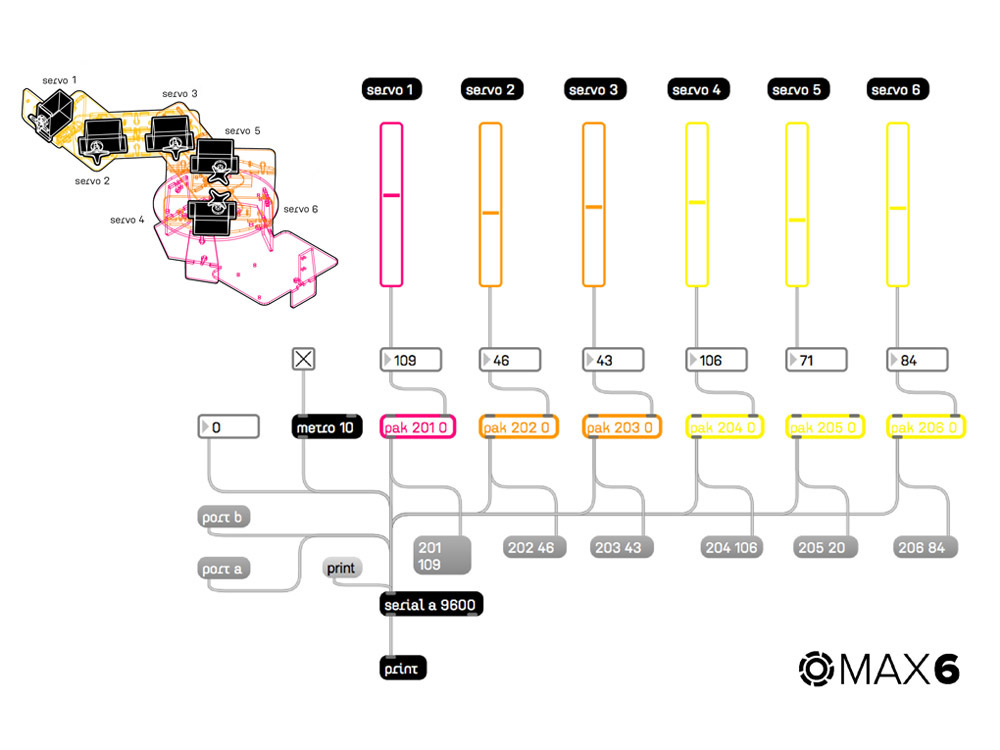
arduino code, using a serial communication with a bunch of different softwares such as
Processing or Max MSP.
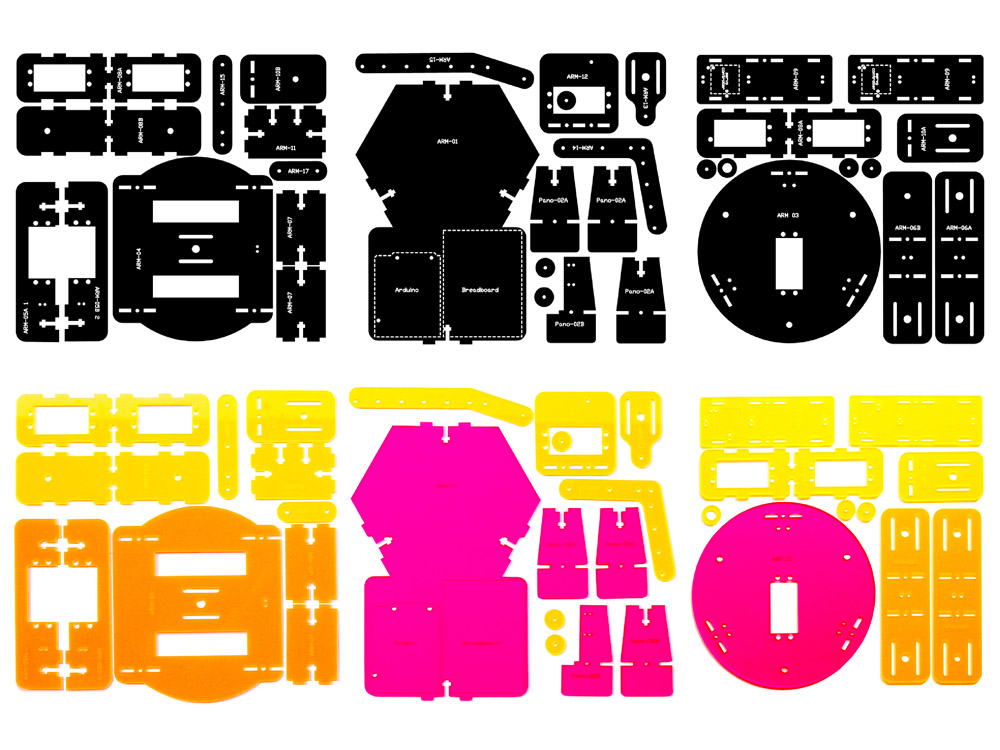
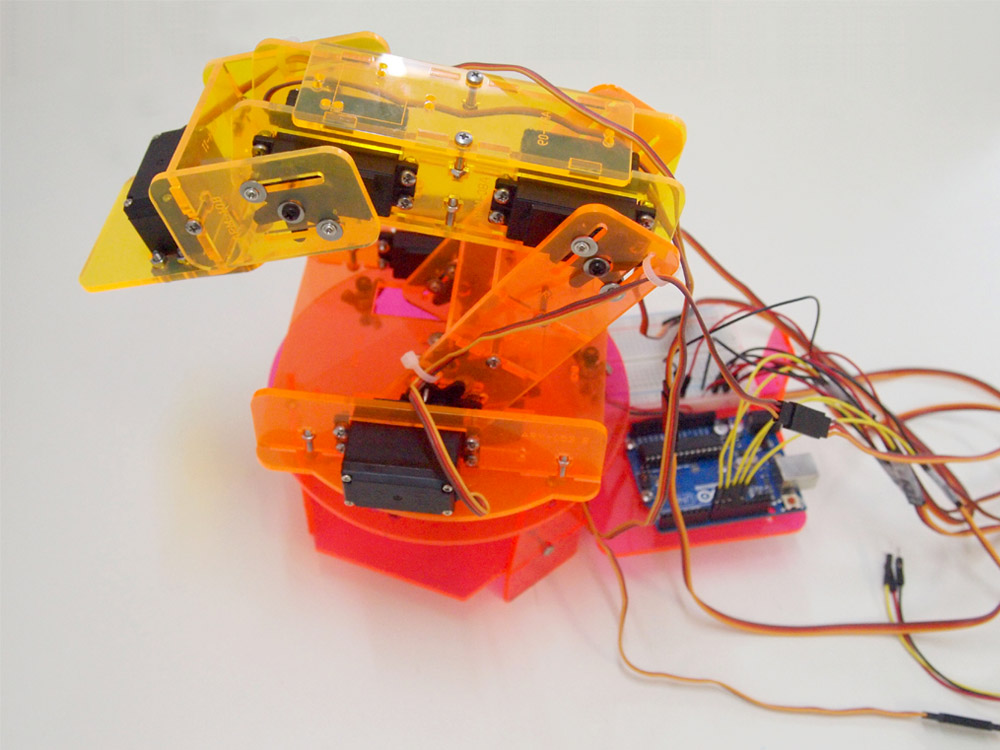
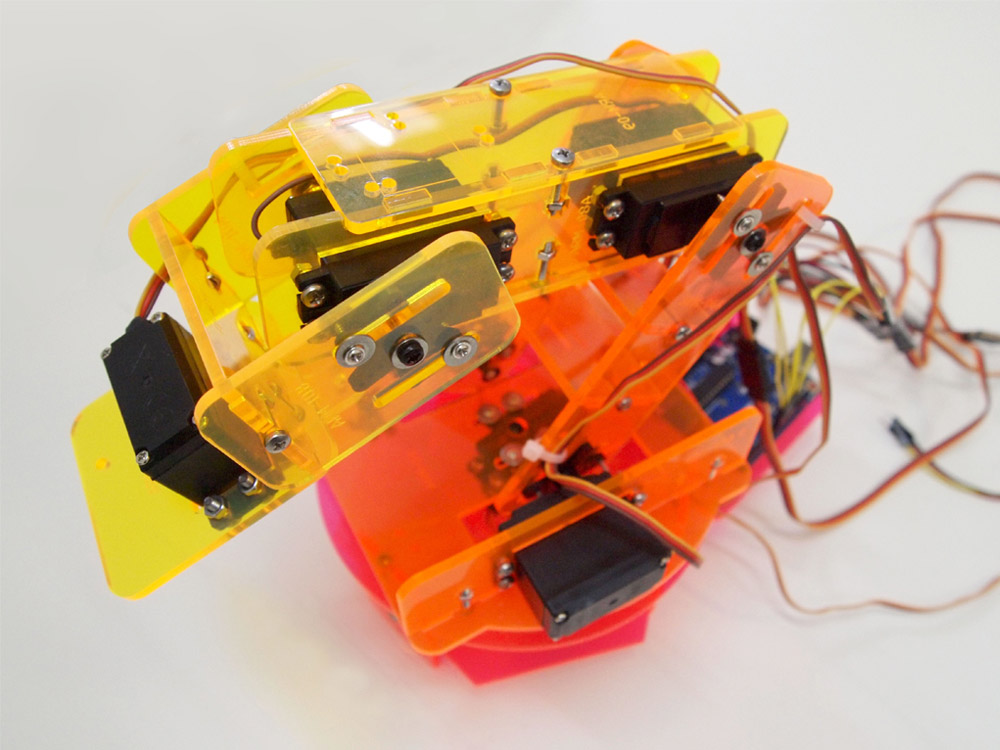
As a basis for building a robotic construction I used an open-source robotic arm from
Oomlout. The structure of the robot consists of 26 parts, which need to be laser-cut, either
from a 3 mm thick wooden panel or an acrylic glass sheets. Parts are then assembled, using
3mm screws and nuts.
materials required: 3mm thick sheets of acrylic glass or wood, screws and nuts (3mm),
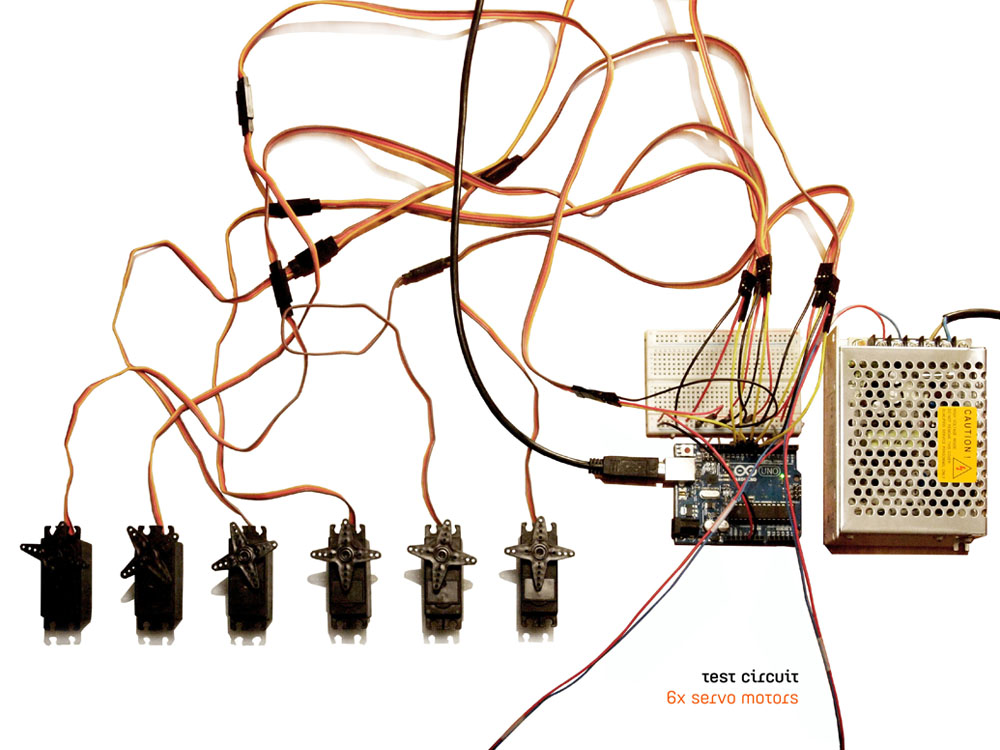
electronics: arduino board, breadboard, jumping wires, servo extension cables,
6 standard servo motors (4.8-6V, 6 kg/cm, 40 grams), external power supply for servo motors
(25 W, 5V, 5 Amp)
software: Arduino+servo library, Max msp (for serial communication and control interface )
other software possibilities for serial communication and servo control: Processing, Open CV…
Category Archives: Martin Lukac
Final Project / Robotic Arm

Also posted in Physical Computing, Students Comments closed
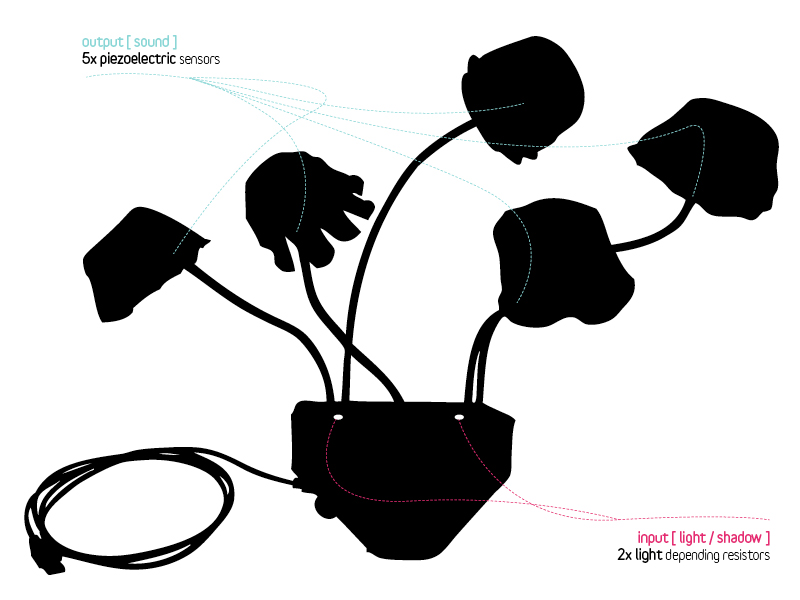
Sound Fungus


video link:http://vimeo.com/54723387
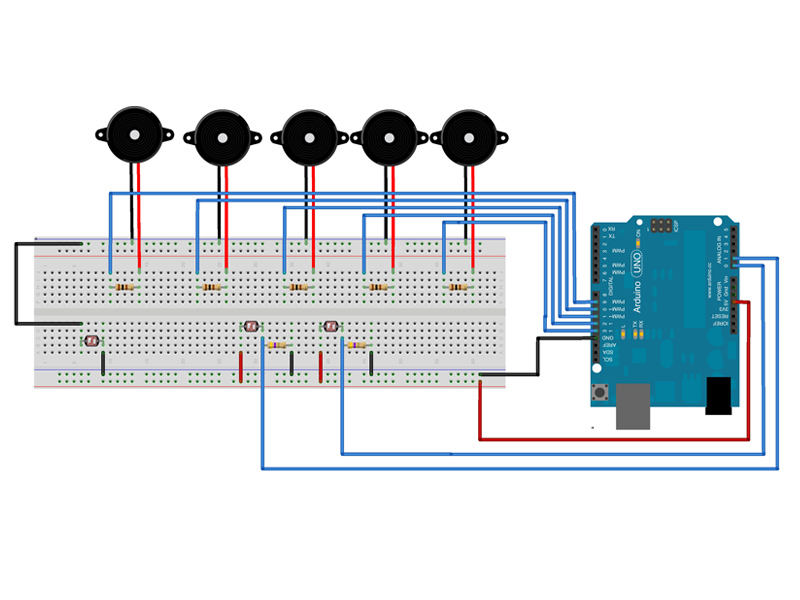
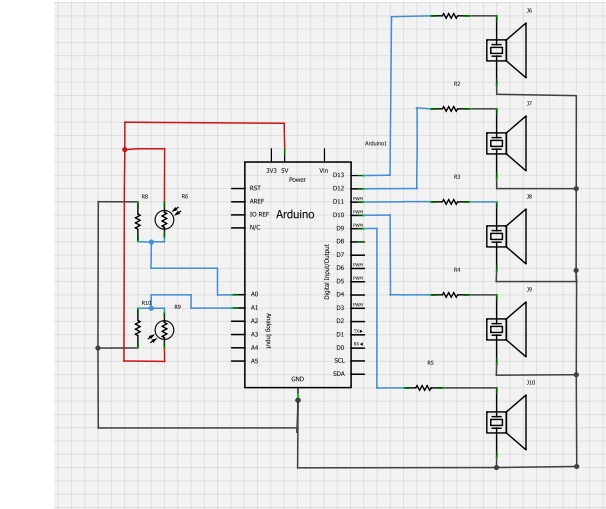
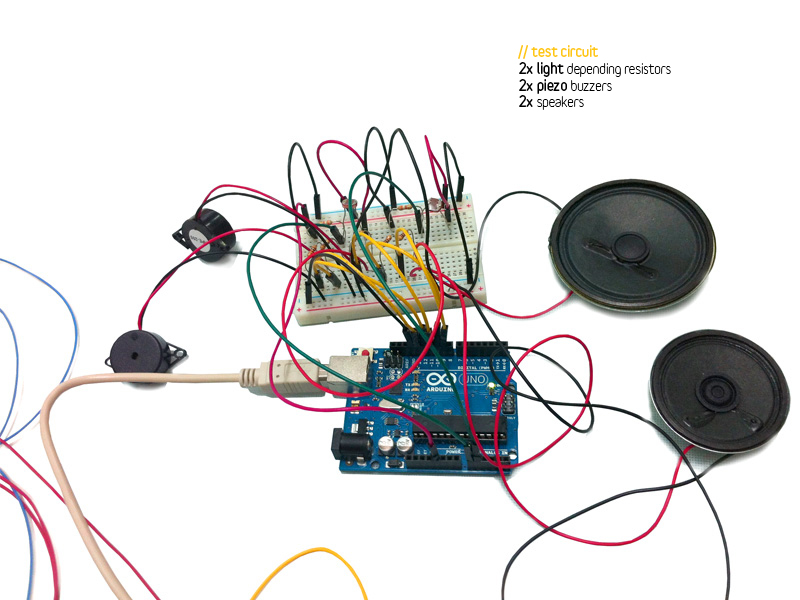
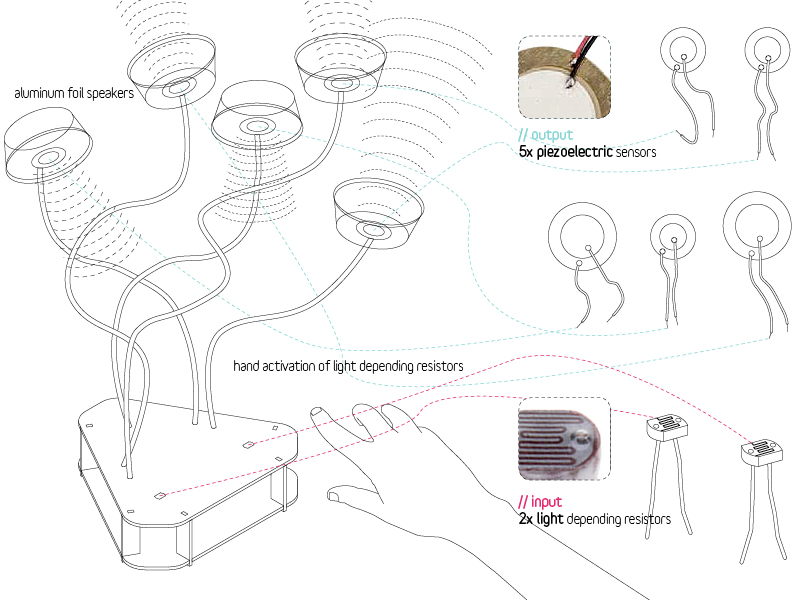
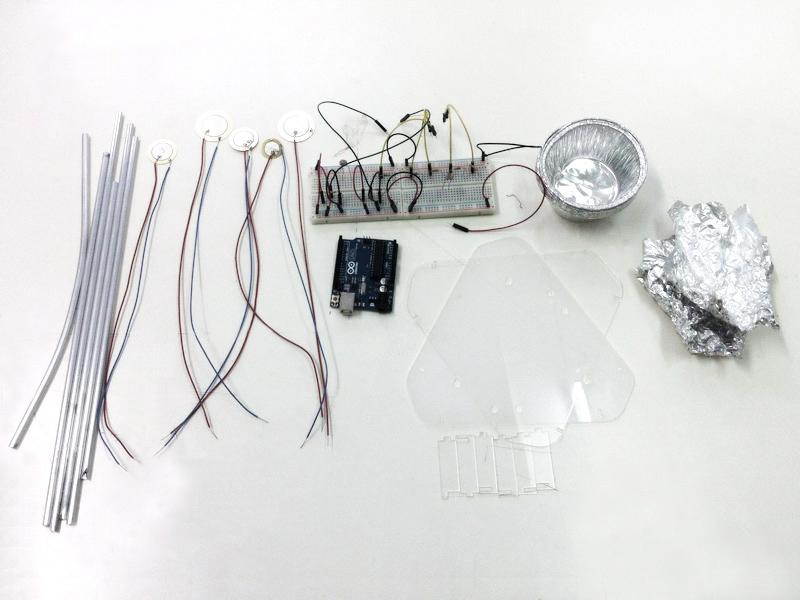
The aim of the project was t produce sound by using light as a stimulus. In Arduino language we are using five peizo as actuator and photo light resistor as external sensor. Below is the testing image and bread board view of the circute.
We gave it a fungus mushroom like shape, in which each fungus is rising out a common base made up of sand acrylic glass, which houses the Arduino and the bread board. Each fungus ends we an inverted aluminum cup, which not only gives it a fungus mushroom like look but it is also acts as an amplifier and conceal the piezos.



Also posted in Furqan Habib, Physical Computing Comments closed