

The two prototypes developed were developed under the concept of leading the forces on the cleanest and fastest way possible through the structure. To achieve this, we looked upon the arch and its structural behavior and decided to explore it in two different ways. First, we explored the essence of the arch and how a surface could be done by joining several of them transferring the loads to exploit the arches distribution ability. Second, the possibility of doing a multiple direction arch by adding the behavior in every direction through bending, compressing, and tensioning.
PROTOTYPE 1// Apex Arch
The main concept of the prototype is to transfer all the loads from arch to arch always in the apex of this, being it the best position for the arch to take the load. This was achieved through creating a ring of arches which is repeated, scaled, and rotated to fit within the axis of the previous ring. This allows the stress, either tension or compression, to flow in a fast and effective way through the structure with minimal material and weight. The forces trajectory is as illustrated in Figure 1.1 and the reactions of the component in Figure 1.2.
To transfer the loads from arch to arch a slot joint was developed. By joining it this way we expect it to act as a fixed joint that transfers all loads and moments to the receiving arch and so avoiding any movement that may unbalance the system. (Figure 1.3)
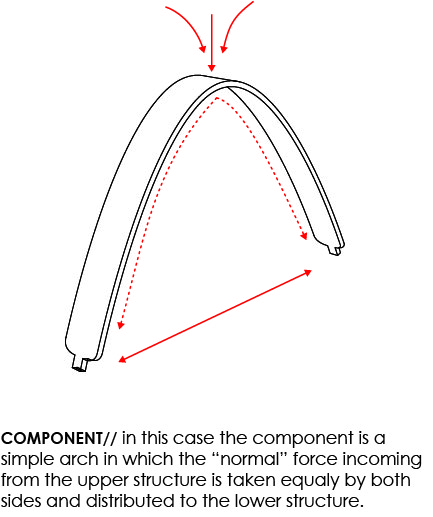
Figure 1.1
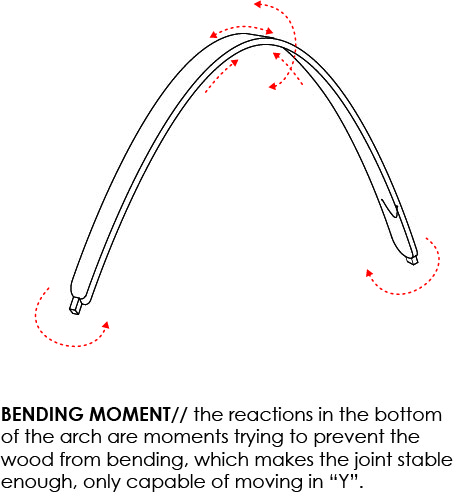
Figure 1.2
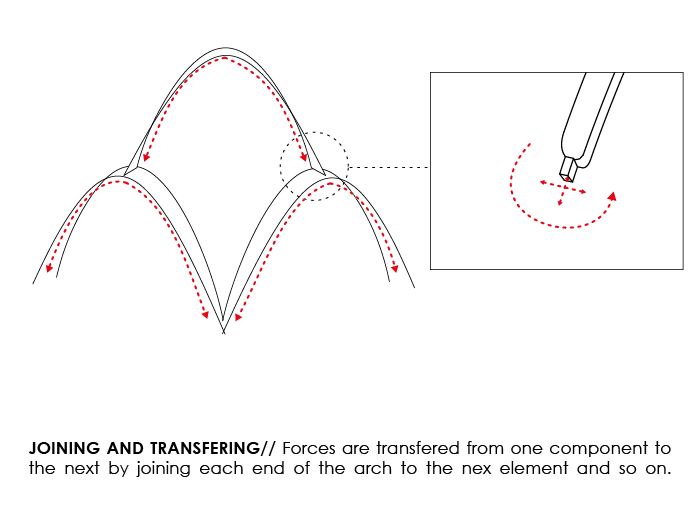
Figure 1.3
Since the system’s behavior is best at tension and compression, the models developed are both a radial composition which hangs and stands from its base. This allows compressive and tensile stresses to go directly to the base. Pre-stressing the arches with a twist along its axis was implemented, makes the arch be stronger and also for the joints to work better.

3D Model
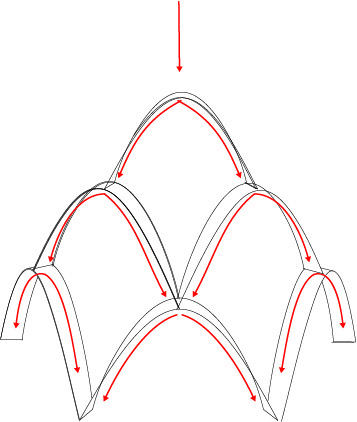
Figure 1.4
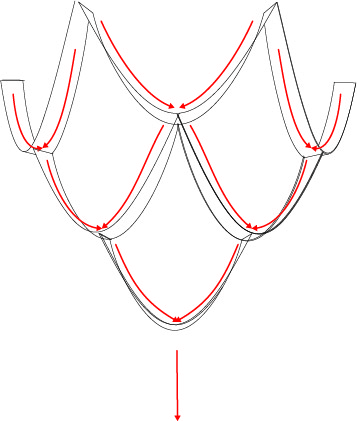
Figure 1.5
The material selected was wood, having the fibers run parallel to the length of the arch. This takes profit of the woods tensile strength in that direction. Upon fabricating it, we saw that the tension relief cuts along the arch had to be smaller since their proximity to the edge was a weak point when bending. To achieve the desired bend the wood had to be damped, otherwise it was too strong to put in position.
PROTOTYPE 2// Multi-direction Arch
The idea behind this prototype is that no matter where the force is applied we take profit of the arch’s ability to transfer the load effectively through its body. To do this, we treated the component first as a planar surface first, by joining four arches, one in each direction, into an “X” shape component. This allows forces applied to any end to be transferred effectively to the other end of the arch. (Figure 2.1) But what if forces are acting perpendicular to the axis or a bending moment is applied? Because of it being “X” shaped, when bent, the material properties take the stress and that act diagonally from one end to the opposite. (Figure 2.2)
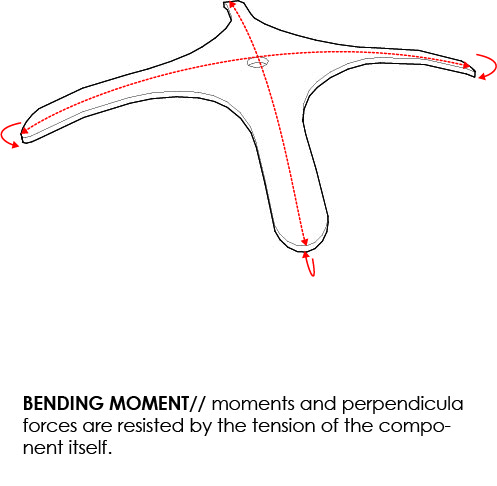
Figure 2.2
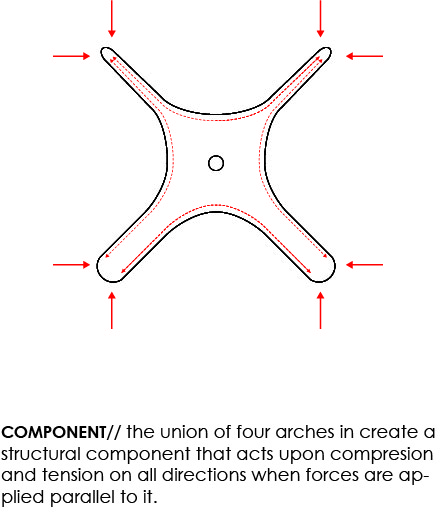
Figure 2.1
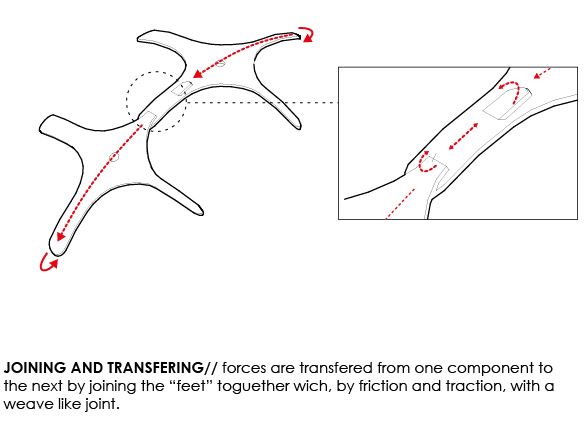
Figure 2.3
So, how does it transfer the stress from one component to the next? Since the components are coplanar we take profit of its bending to create, through a weave joint, enough traction to keep the weave from pulling apart and transferring tension or compression to the next. This in turn, since they are joined in the same deformation, transfers the bending moment and distributes it throughout the surface. (Figure 2.3)
All this properties allow the component to behave in several compositions (as long as it is bent to give inertia to the whole piece). The examples explored were, vertical tube acting upon compression, dome acting in tension/compression, and inverted dome acting on tension. (Figure 2.4)
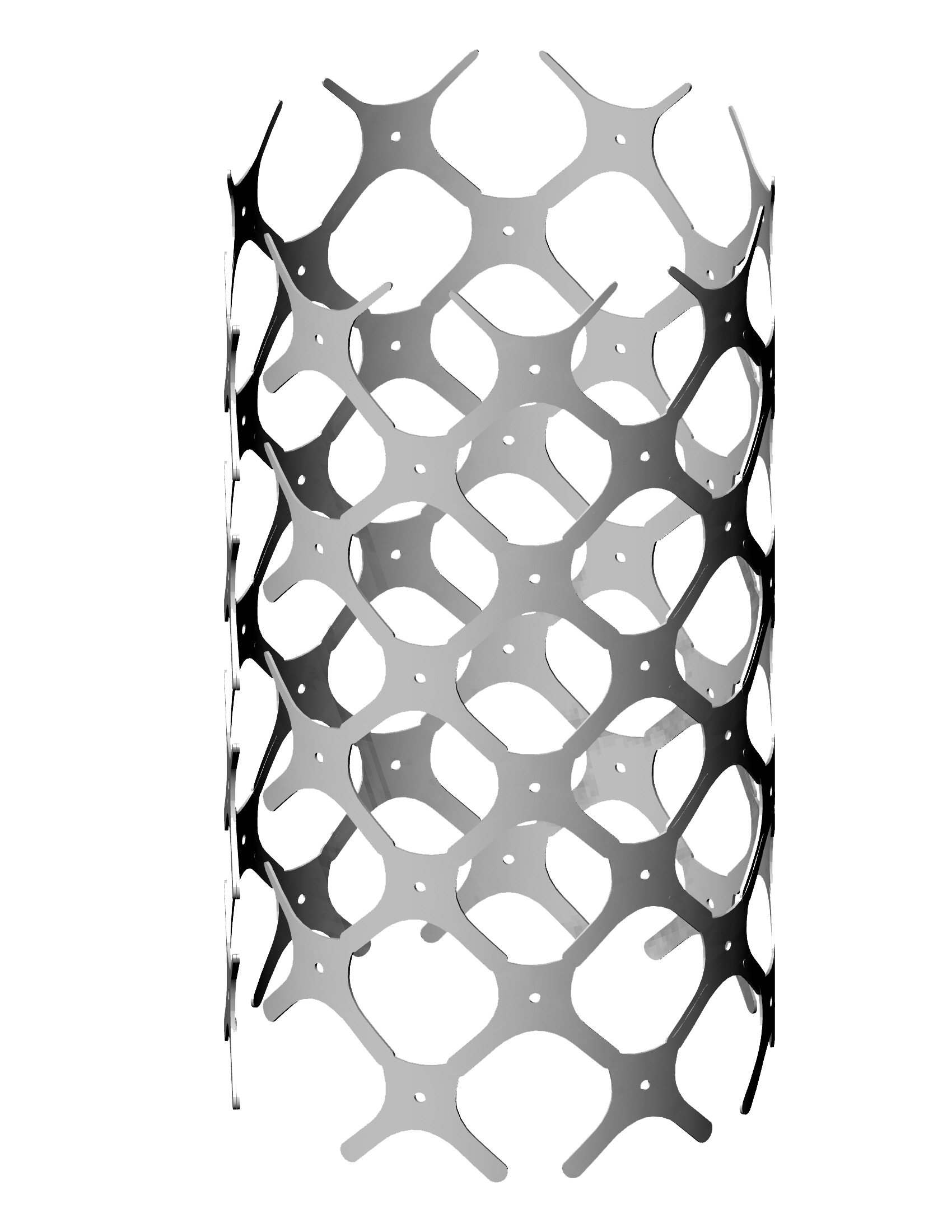
Figure 2.4
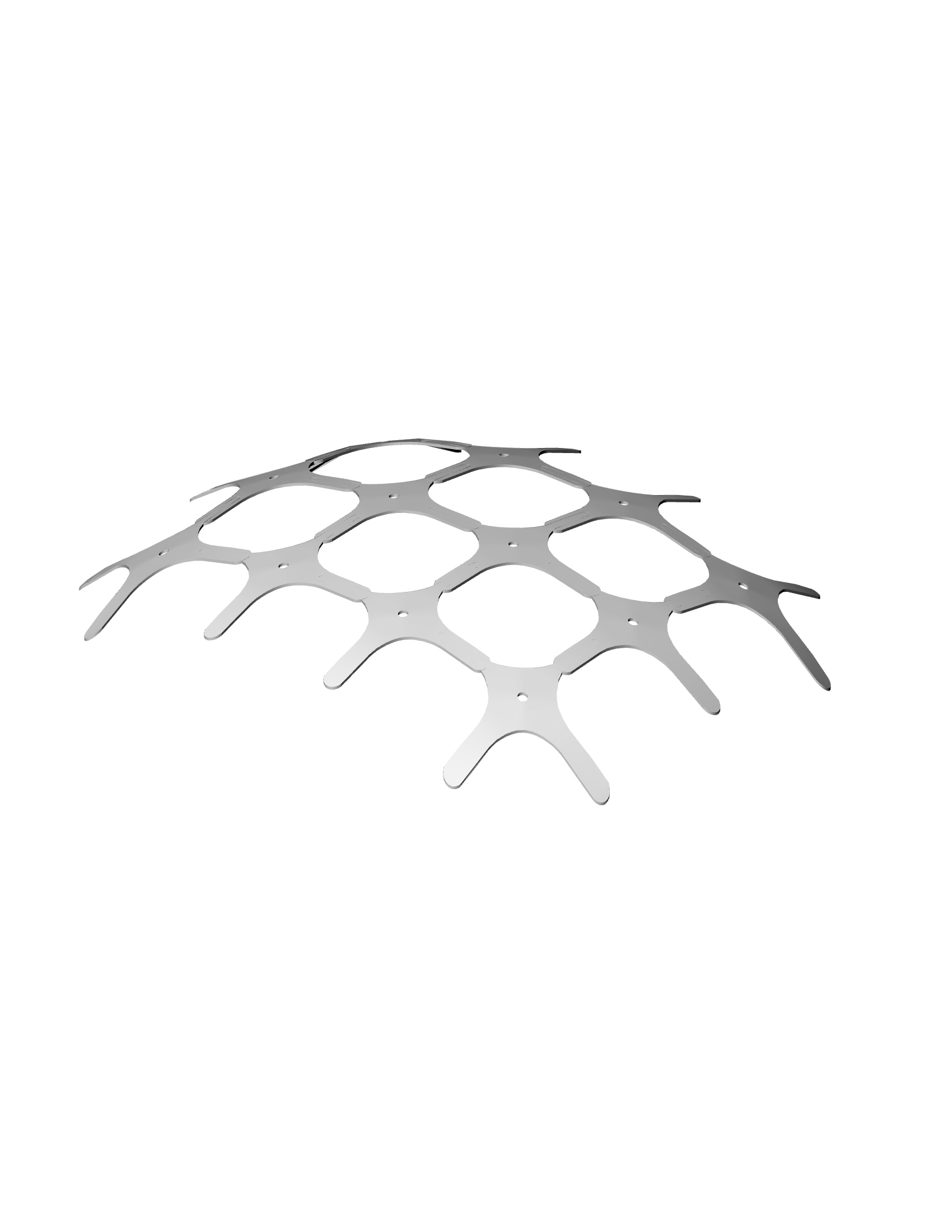
Figure 2.5
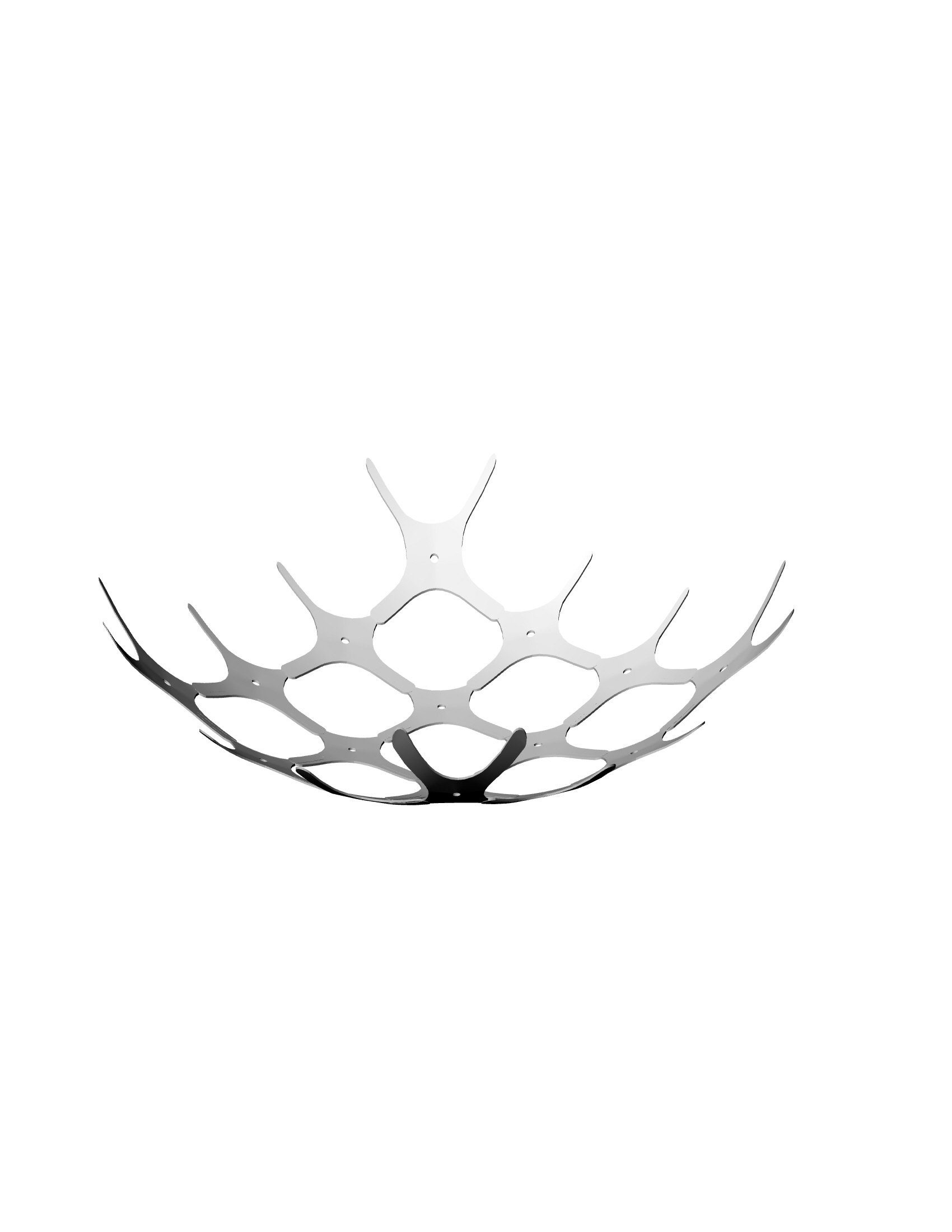
Figure 2.6
Upon fabricating the prototype, we saw that the material is very important in its behavior. When done in plywood for instance, it becomes strong in one direction of the “X” but extremely weak on the other due to the anisotropic behavior of it. Given the case, we changed the material to plastic, which would act in every direction with the same properties. This prototype acted as expected in terms of stress behavior yet the joint, since it works by friction, was too weak because of the lack of roughness in the material. We tried two different types of weaves in the joint and, even though we found that 3 tight weaves was better than two spread wider apart, they still don’t have enough friction to work effectively.
For further research upon the this prototype we propose to explore other materials, as a rougher plastic or metal, adhesives that can maximize the joint, and the behavior in as the scale changes.



Team members.- Pablo Marcet and Alejandro Martìnez del Campo