Martin from Master in Advanced Interaction on Vimeo.
Ant image: Alexander Wild

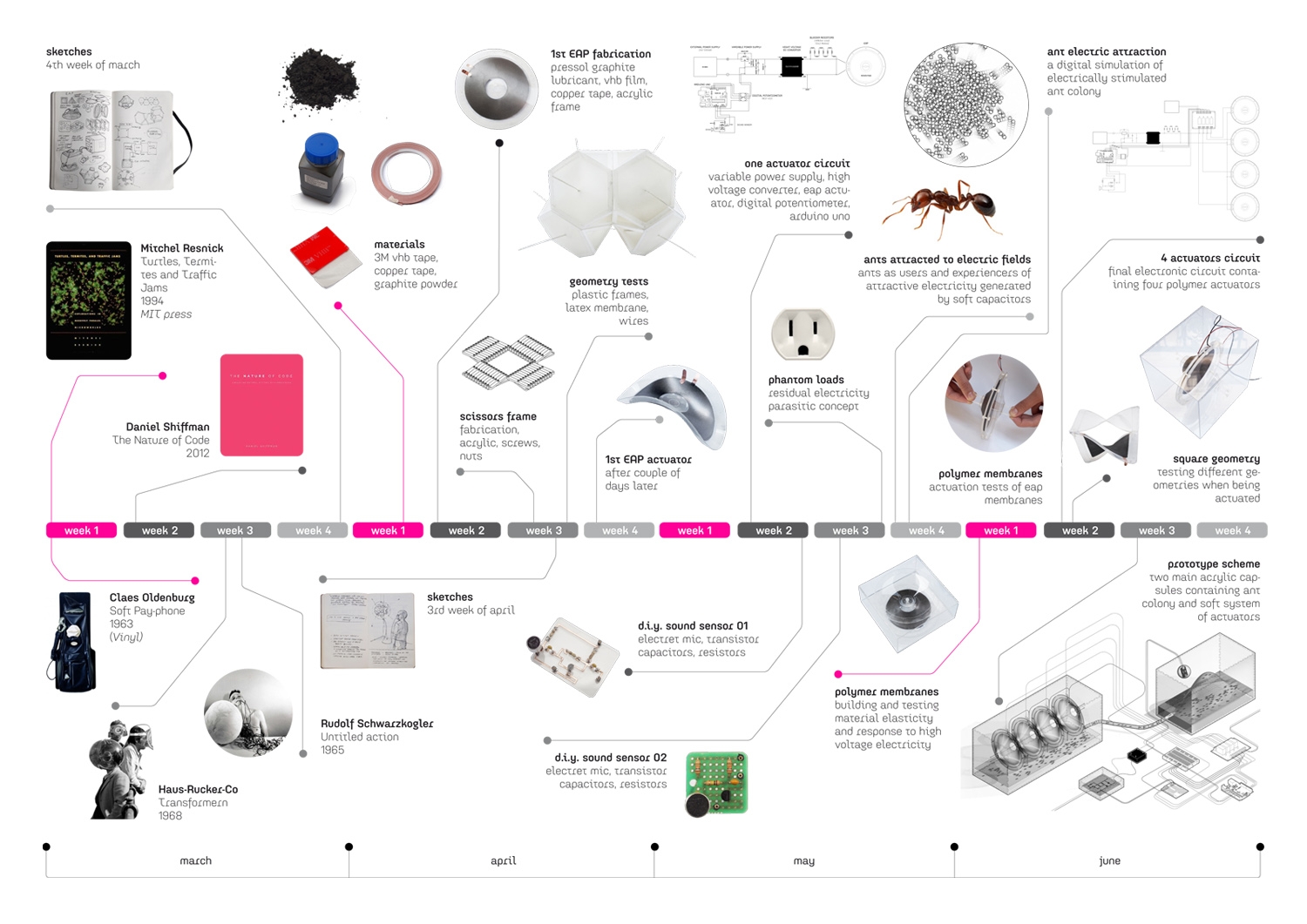
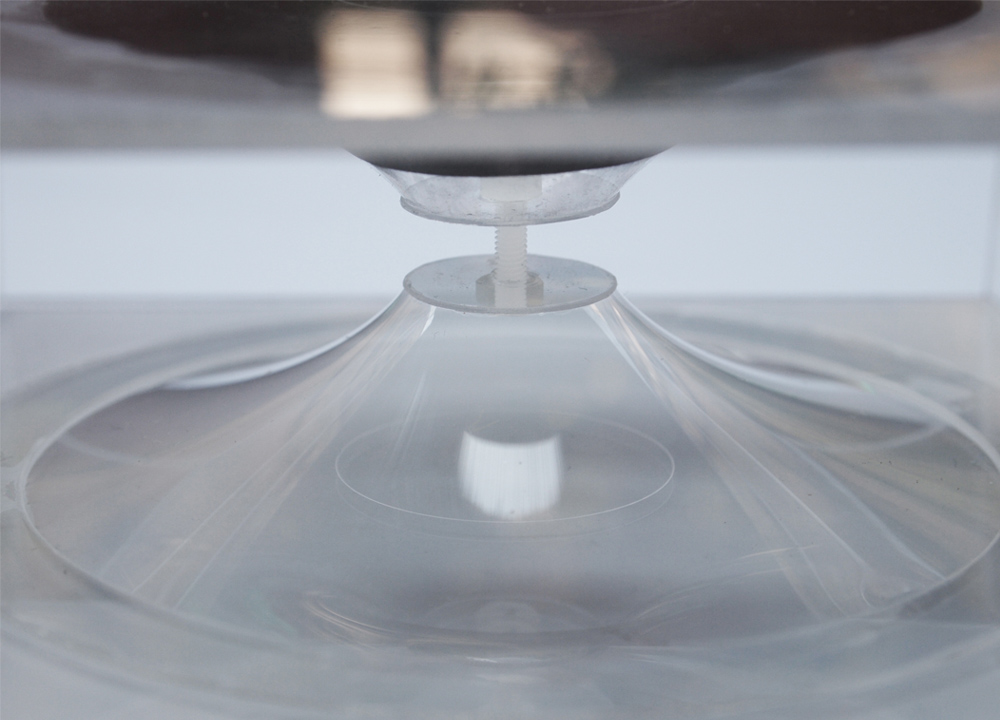
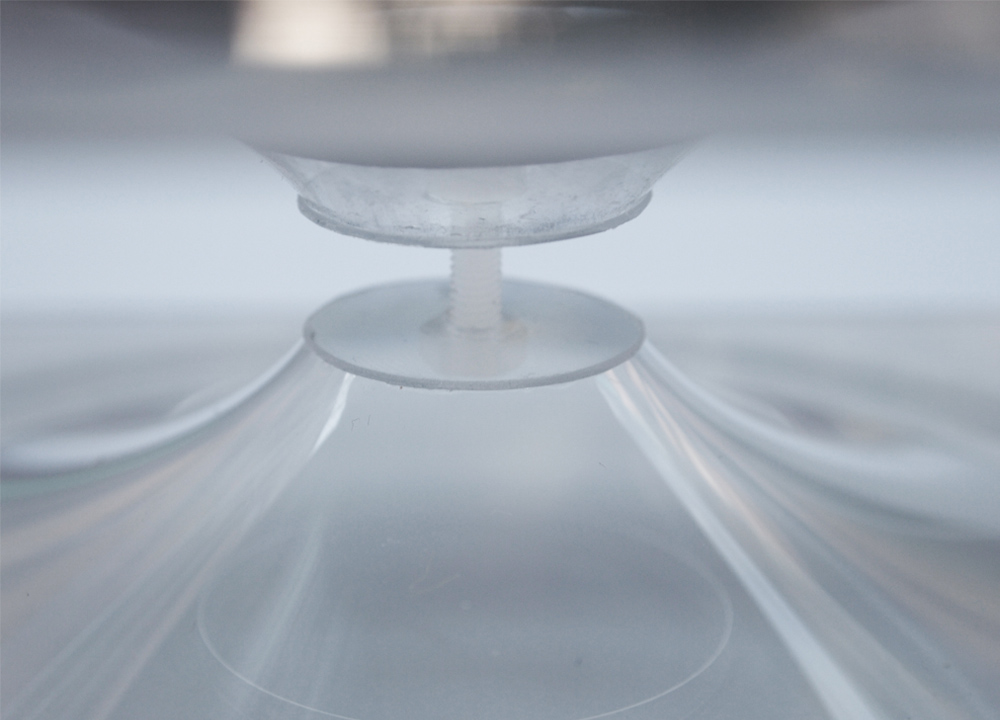
Testing the elasticity of VHB polymer film membranes attached to the planar surface. This method could be applied to the system of polymer actuators inside the final object prototype.
Read More
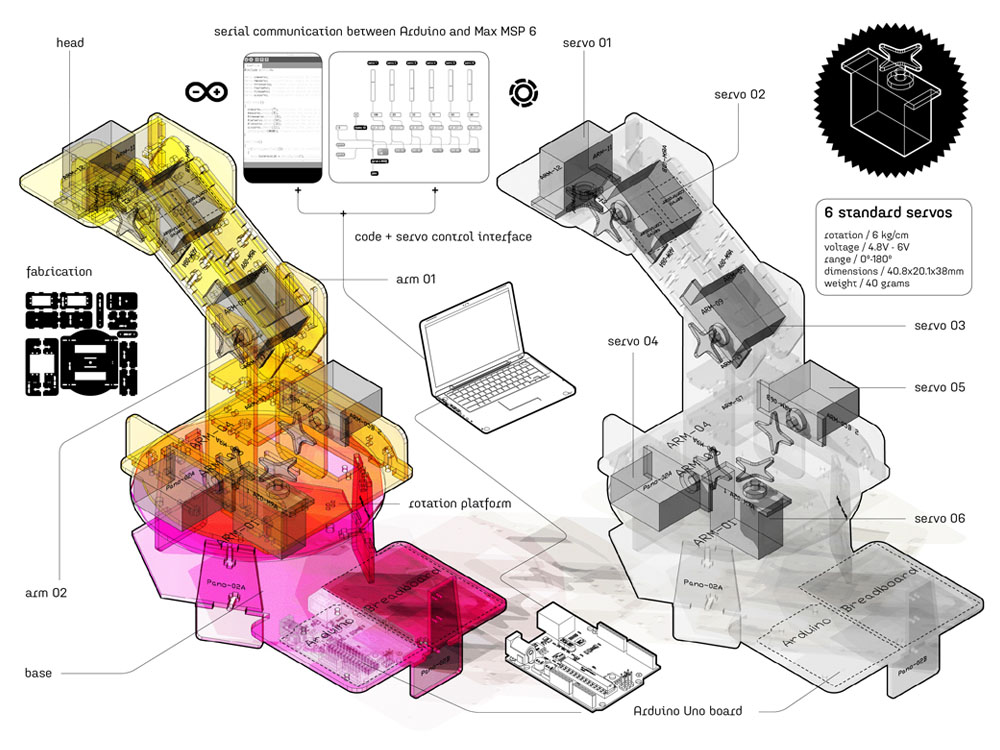
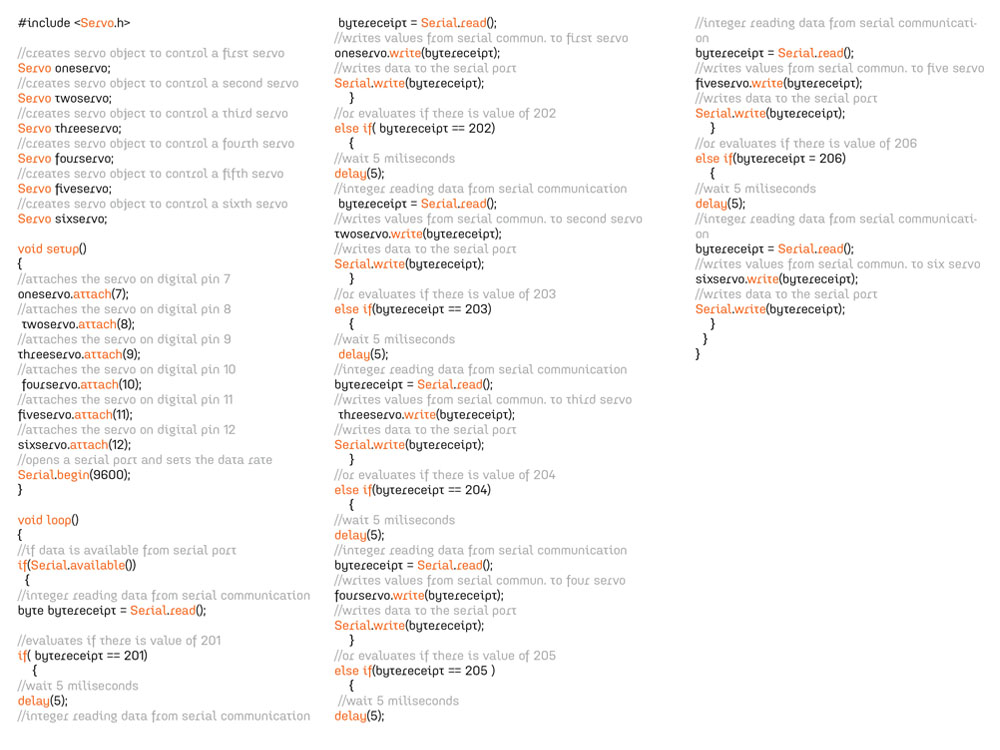
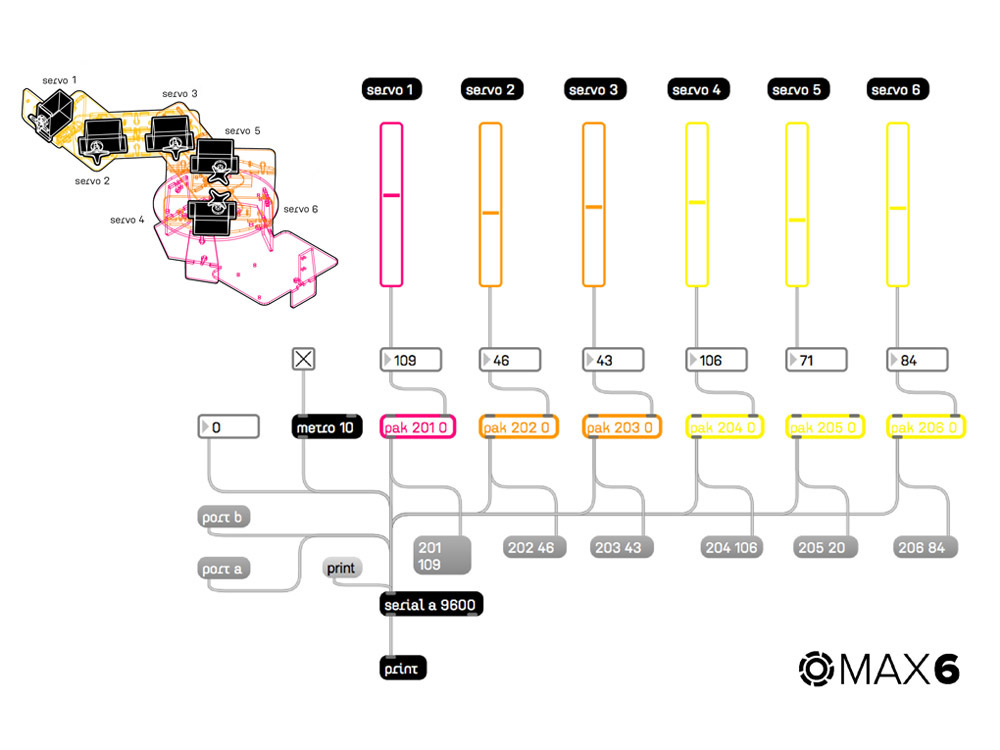
For my final project of physical computing I decided to build a robotic arm, controlled by
six standard-sized servo motors. The idea was to control servos of the robotic arm with an
arduino code, using a serial communication with a bunch of different softwares such as
Processing or Max MSP.
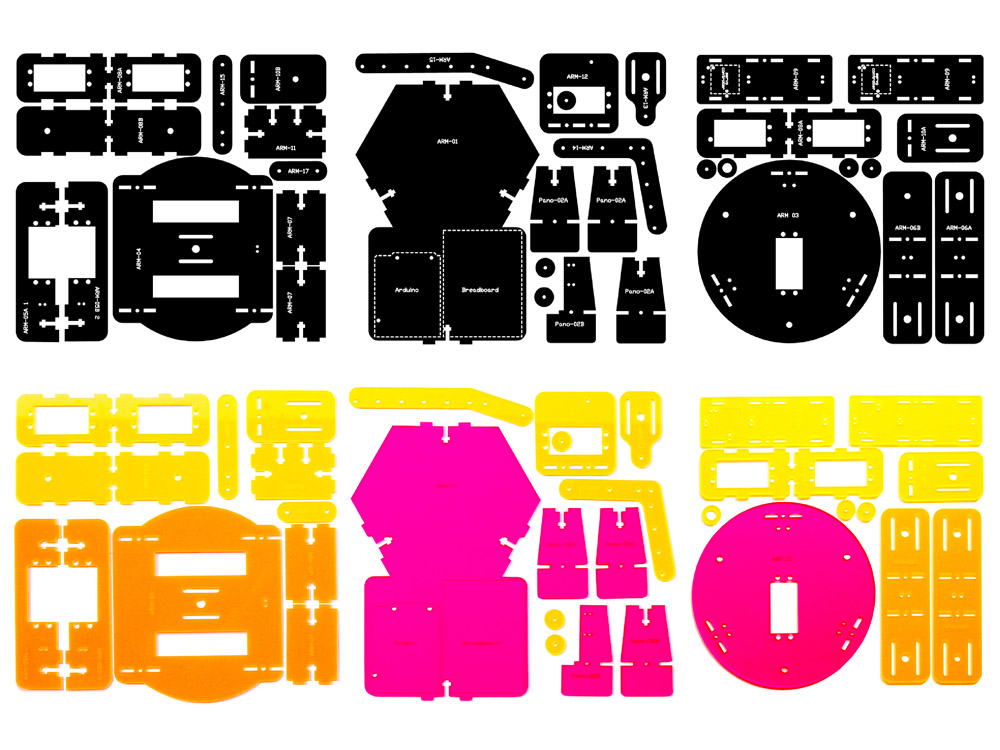
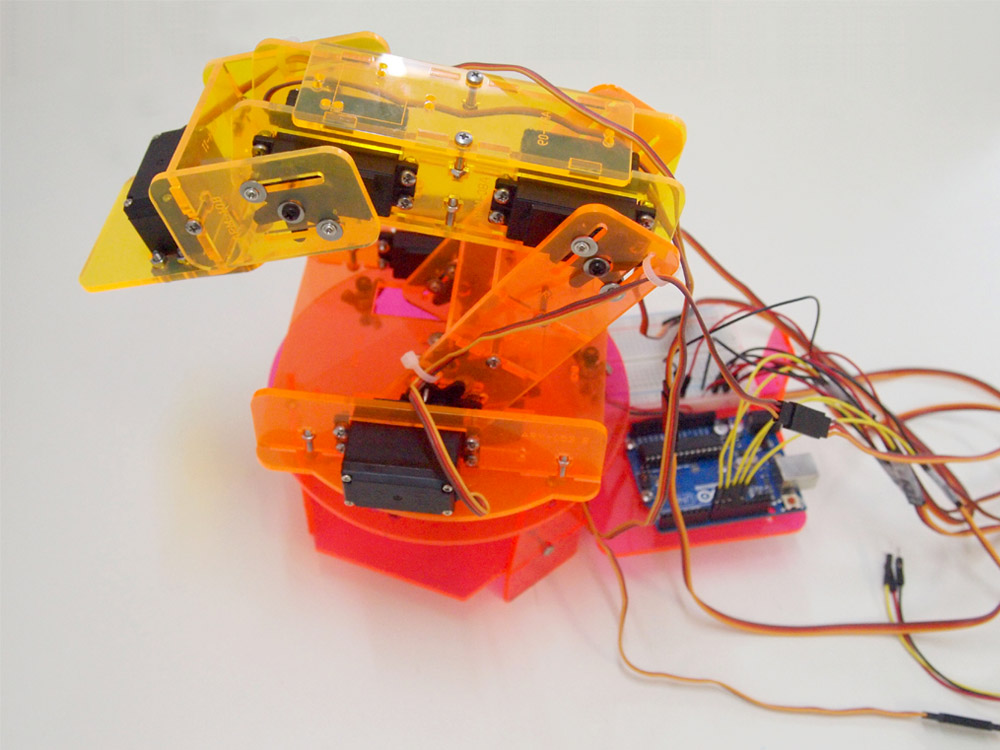
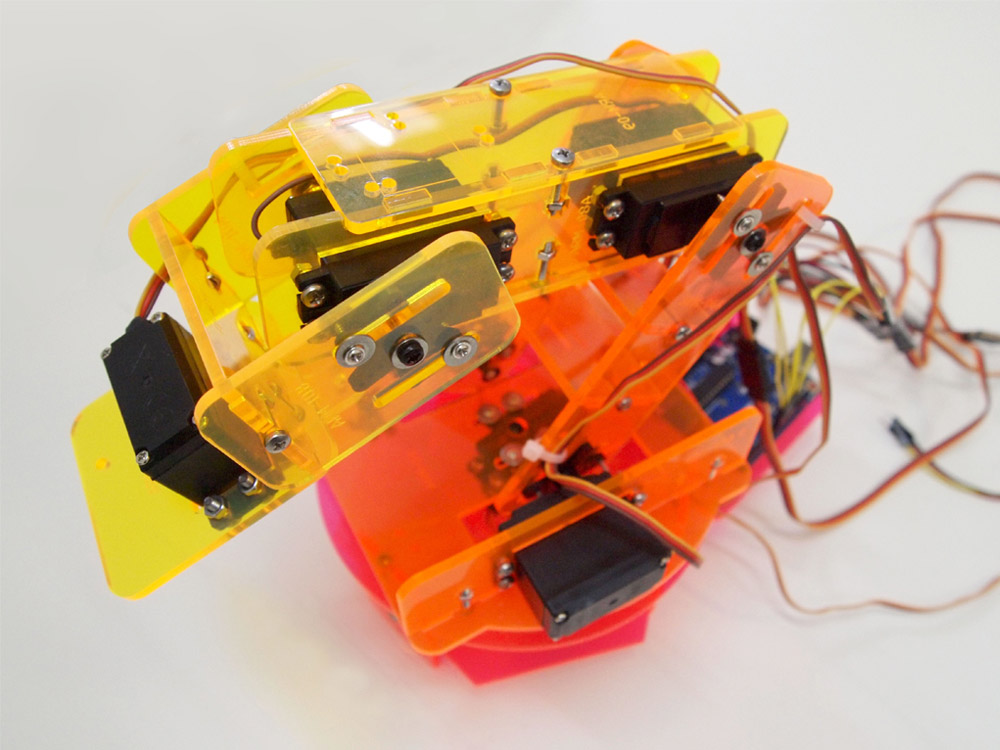
As a basis for building a robotic construction I used an open-source robotic arm from
Oomlout. The structure of the robot consists of 26 parts, which need to be laser-cut, either
from a 3 mm thick wooden panel or an acrylic glass sheets. Parts are then assembled, using
3mm screws and nuts.
materials required: 3mm thick sheets of acrylic glass or wood, screws and nuts (3mm),
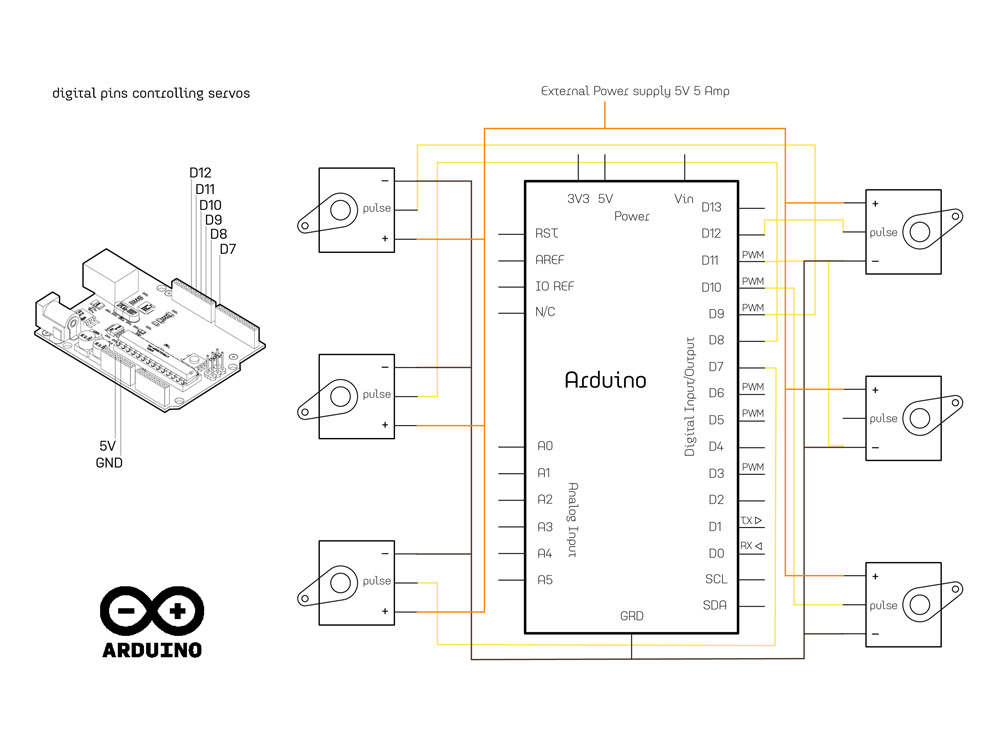
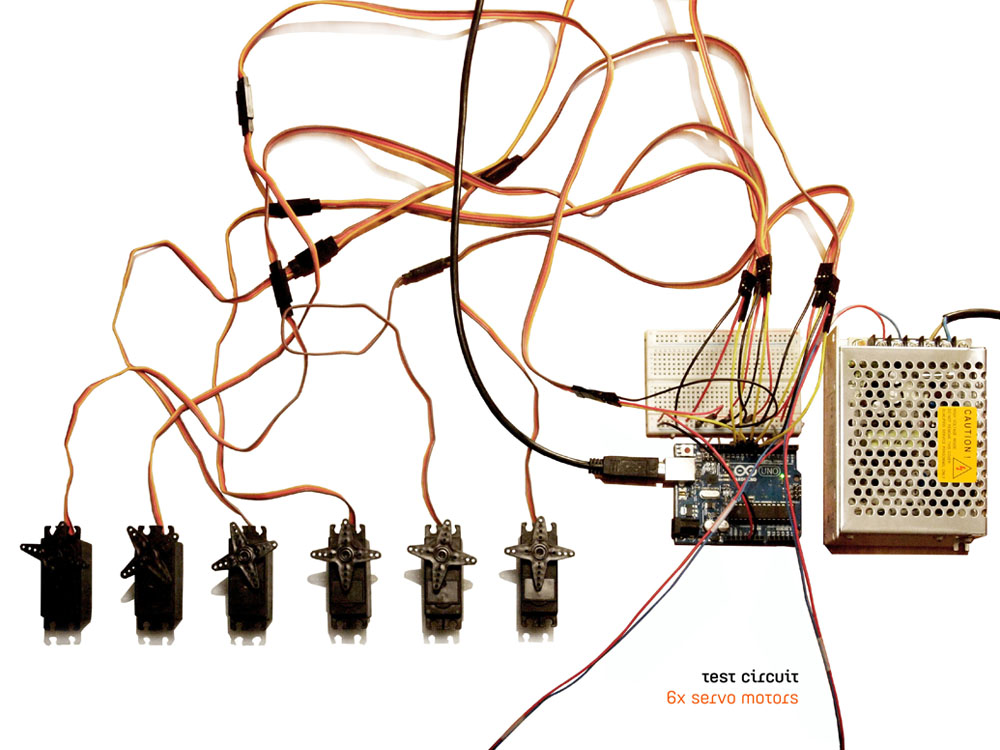
electronics: arduino board, breadboard, jumping wires, servo extension cables,
6 standard servo motors (4.8-6V, 6 kg/cm, 40 grams), external power supply for servo motors
(25 W, 5V, 5 Amp)
software: Arduino+servo library, Max msp (for serial communication and control interface )
other software possibilities for serial communication and servo control: Processing, Open CV…
Robotic Arm Video link.

{kind=link}