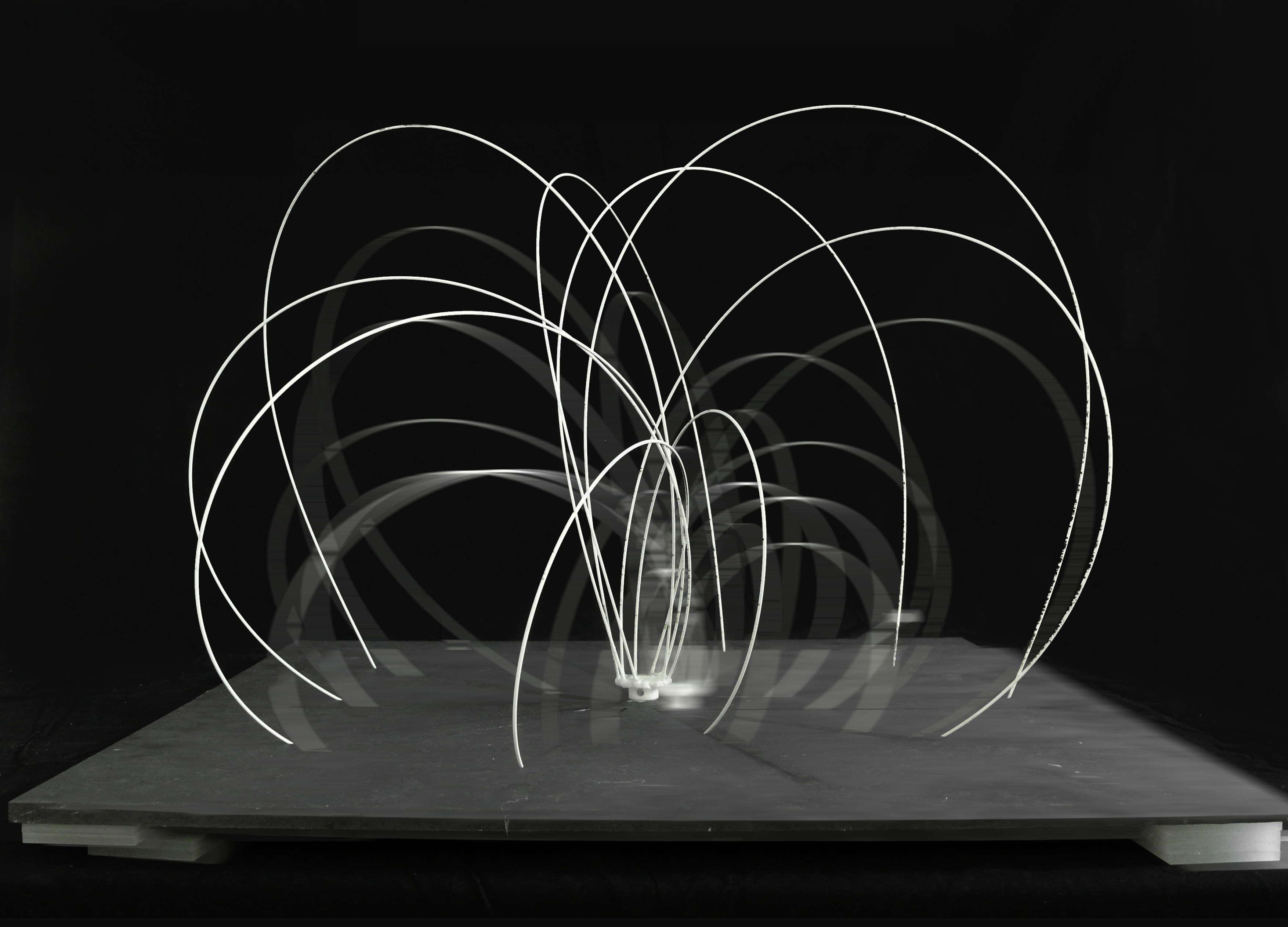
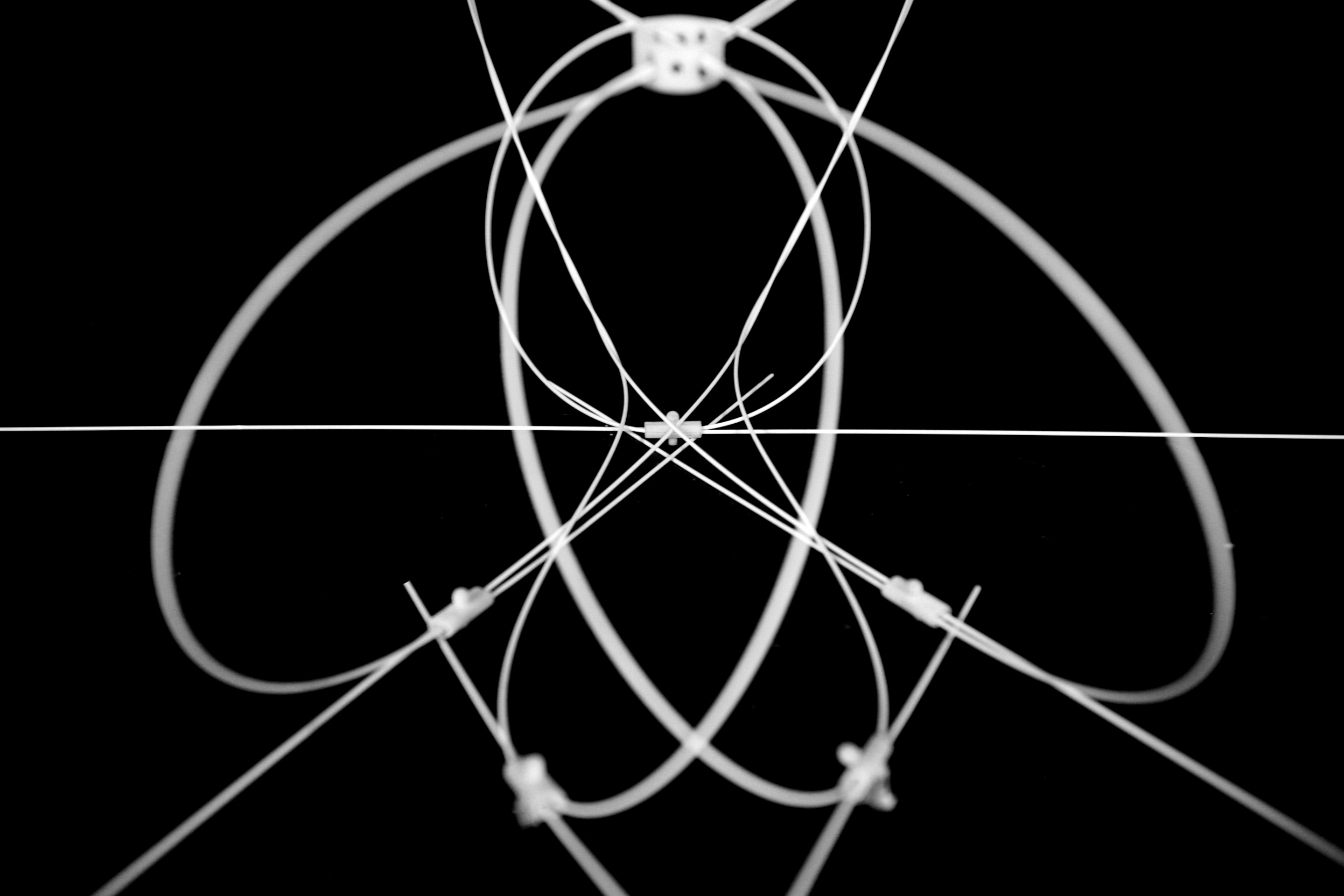
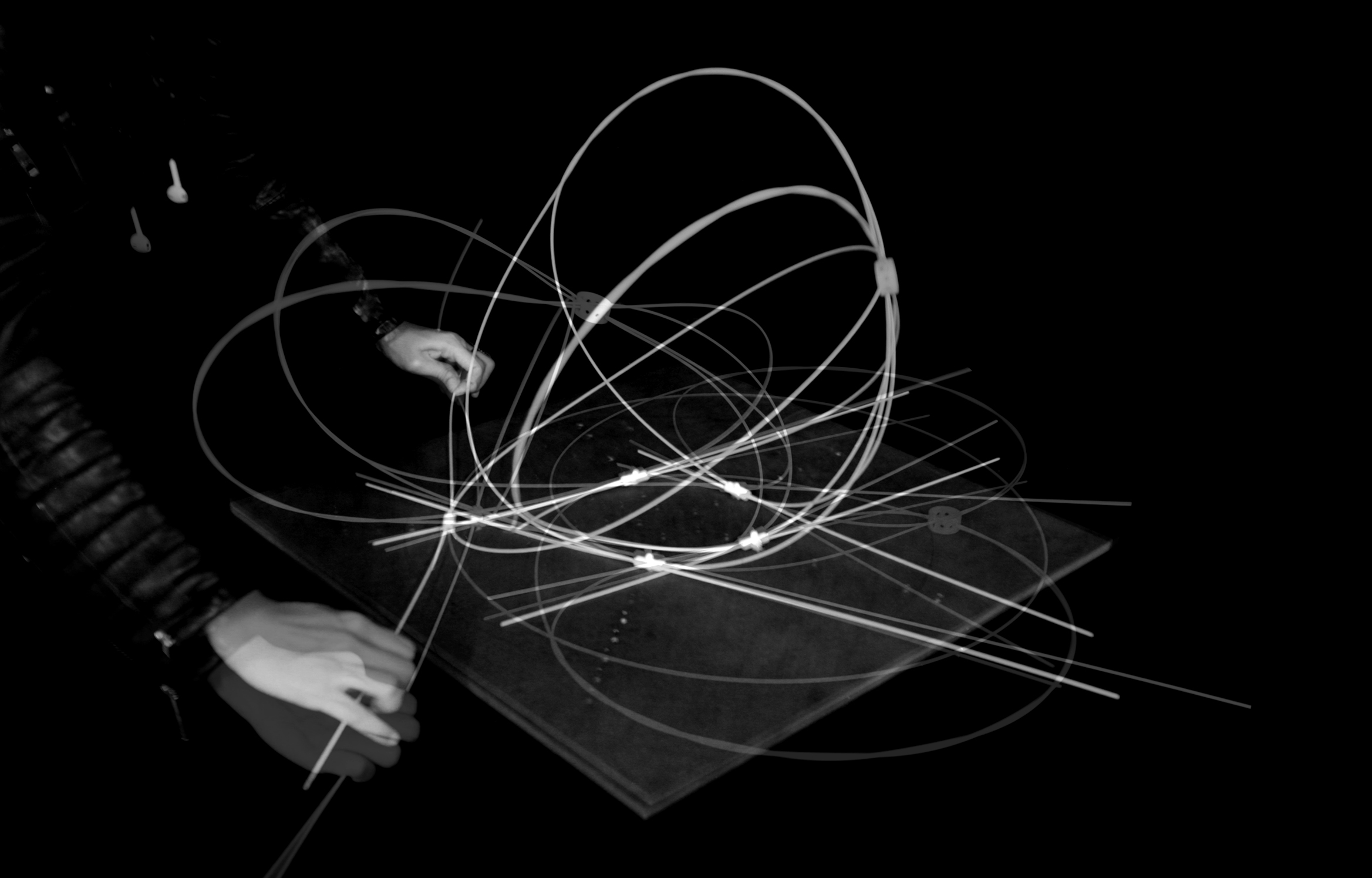
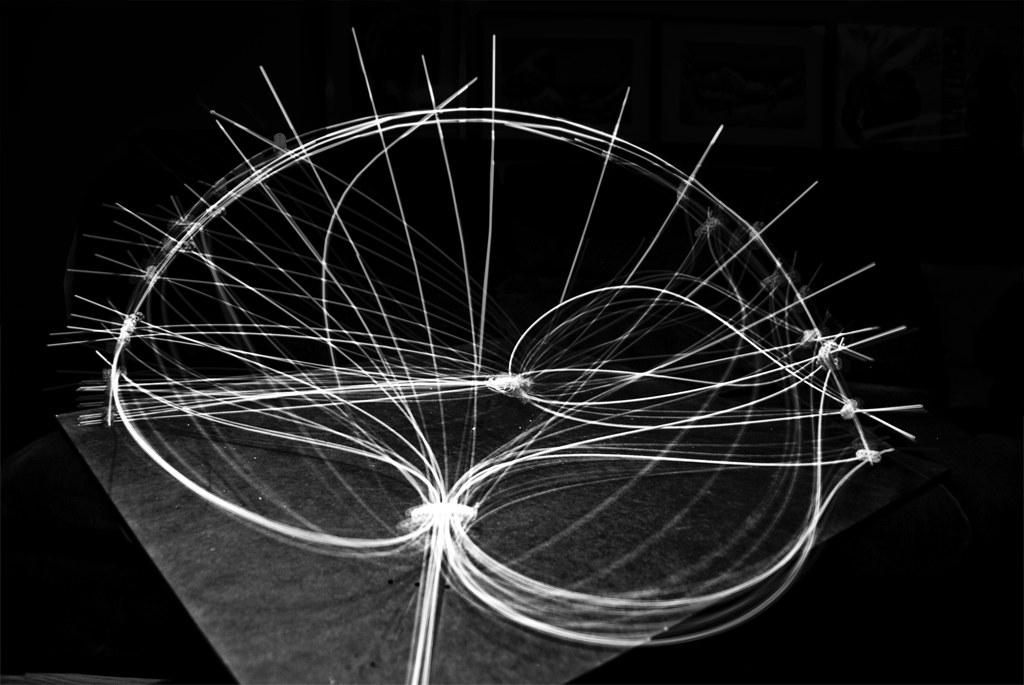
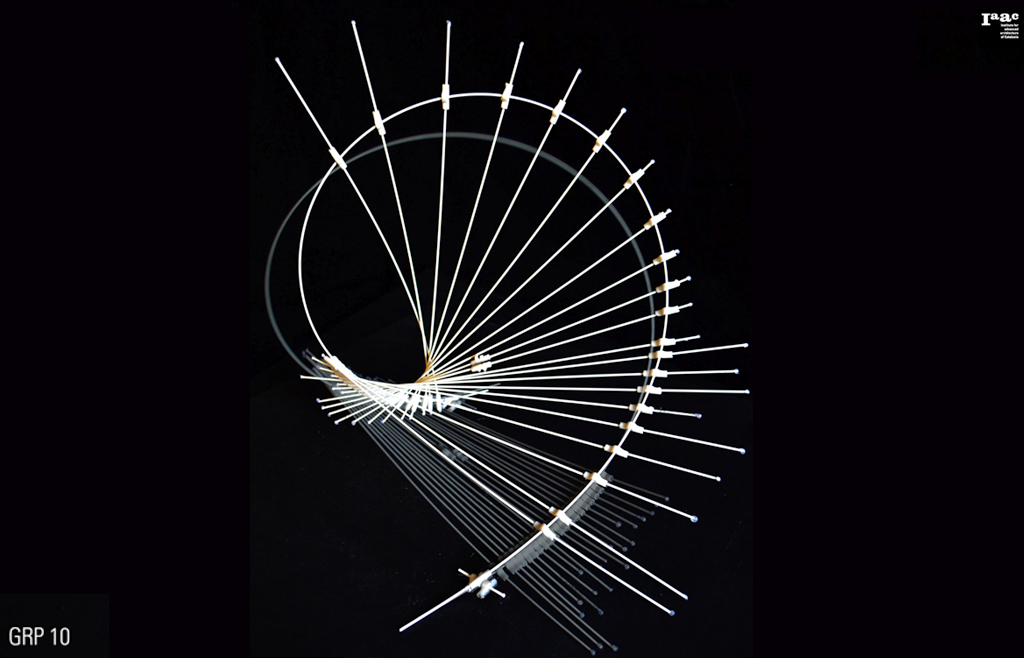
3d printed joints have two categorical ways to interact with thin fiberglass rods. The joint may either constrain the rod, or traverse along its length. In this design, we explored the possibility that each 3d printed component could introduce a new control point to the geometry of a rod’s vector, in addition to the “joint” operation.
The geometry of the 3d printed components is derived from this objective. The closed loop of an orientable surface is perpendicular to the rod’s vector on the apex that the rod passes through, and parallel to its vector on the apex that offers a second control point. The loop geometry is also designed to 1) minimize material without sacrificing the component’s bending strength and 2) meet additive manufacturing’s desire for geometrical self-support during printing. Read More