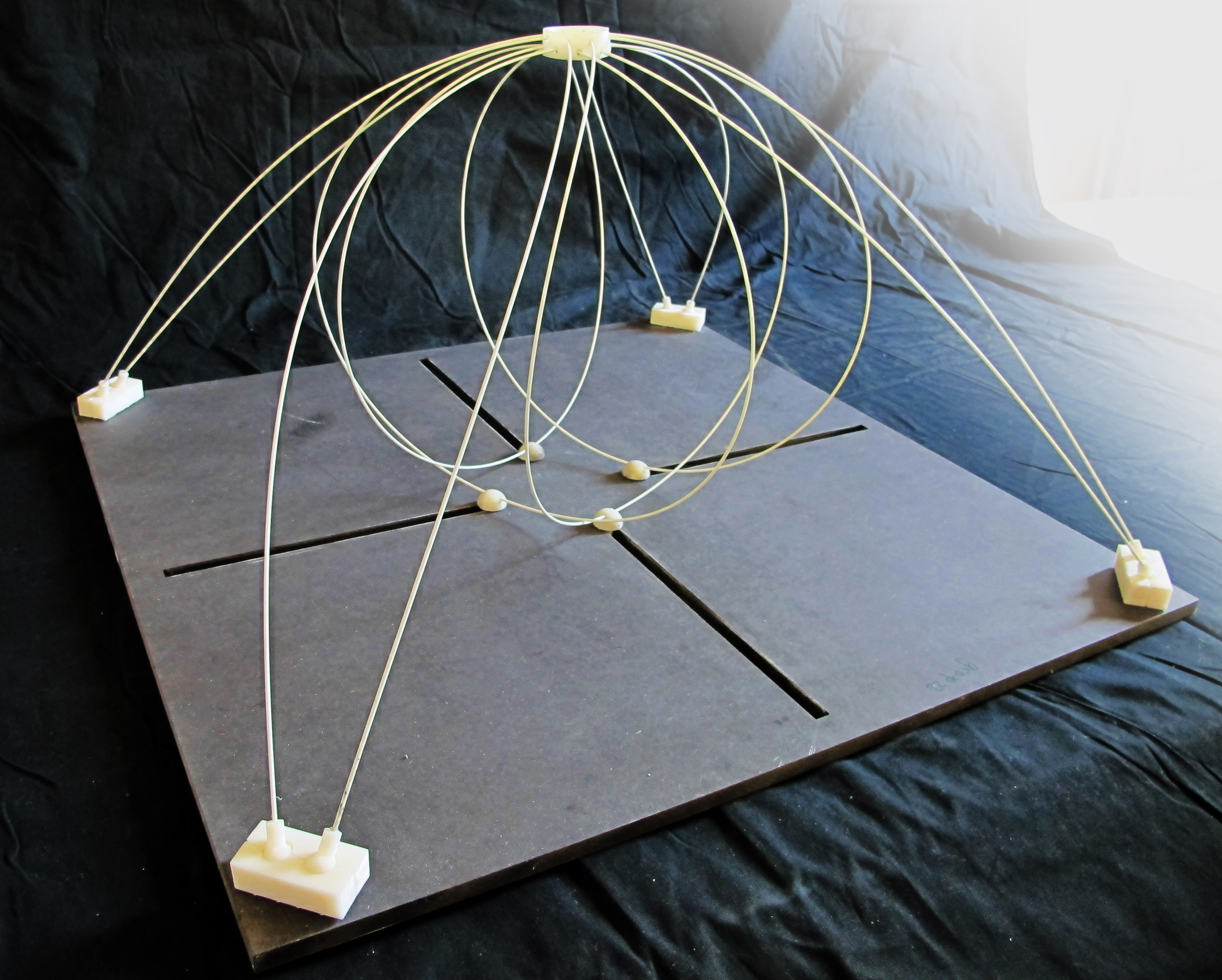
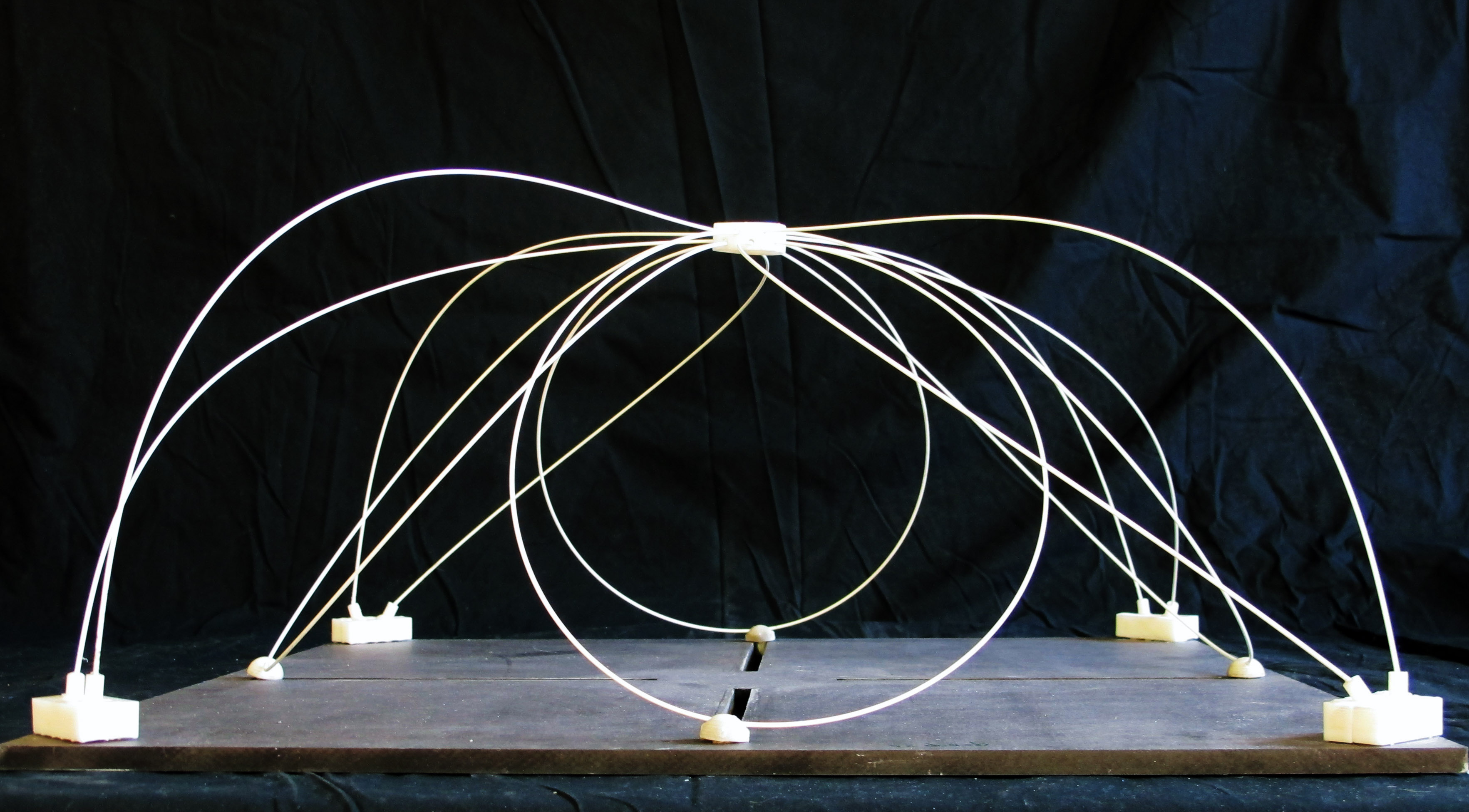
The aim of the exercise was to create a dynamic form with minimal number of simple joints. A dynamic structure was designed with only three types of 3D printed joints ie; 1) roller-joints 2) sliders and 3) and perforated ring. The whole structure was made to take advantage of the bending properties of the fiber rod.
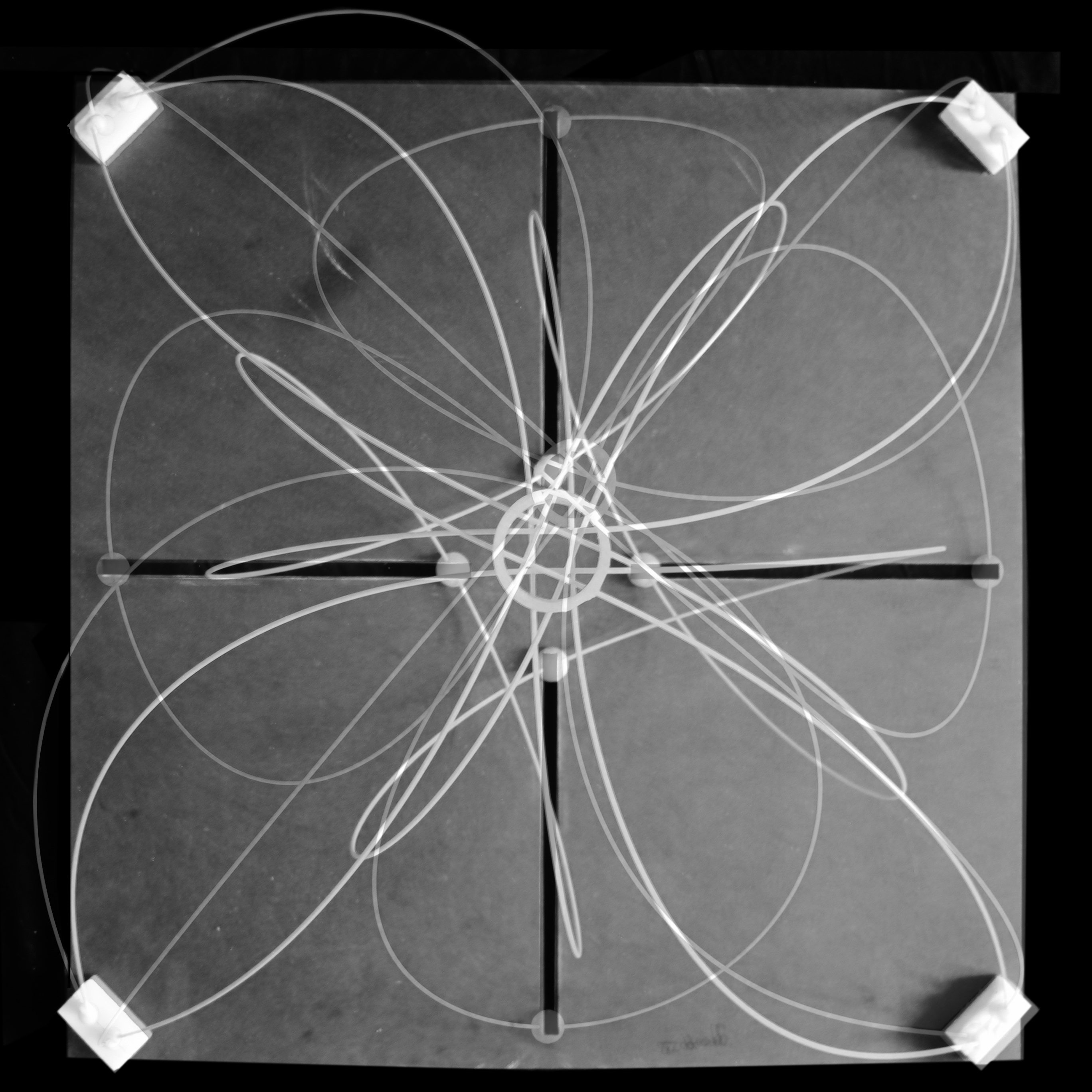
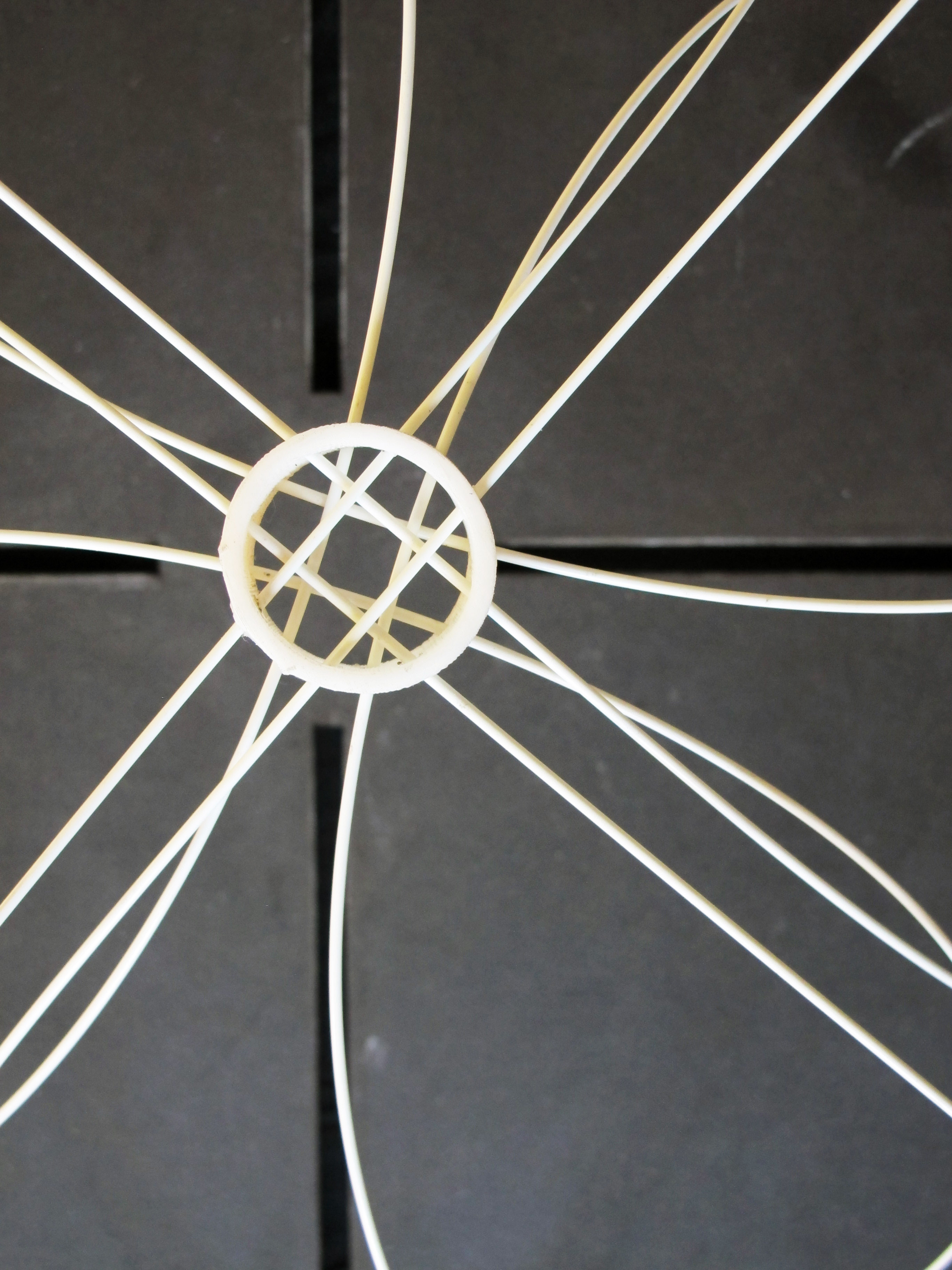
The model forms a floral shape with four “petals” that can open and close forming the different instances. The structure begins with ball bearings (fixed to the base on four corners) the rod starts from one corner, forms a loop passing through the central ring (the tying element at the apex) and the slider (on the base) and ends at another ball bearing on the diagonally opposite corner. We also tried to combine laser cutting technique along with this exercise by placing the sliders on laser cut tracks so that they could move along and as well as lock themselves on the track. While the sliders are pushed-in or pulled-out, the resultant compression in the rods and deformation of the peripheral structure are corrected automatically by the movement of the ball bearings.

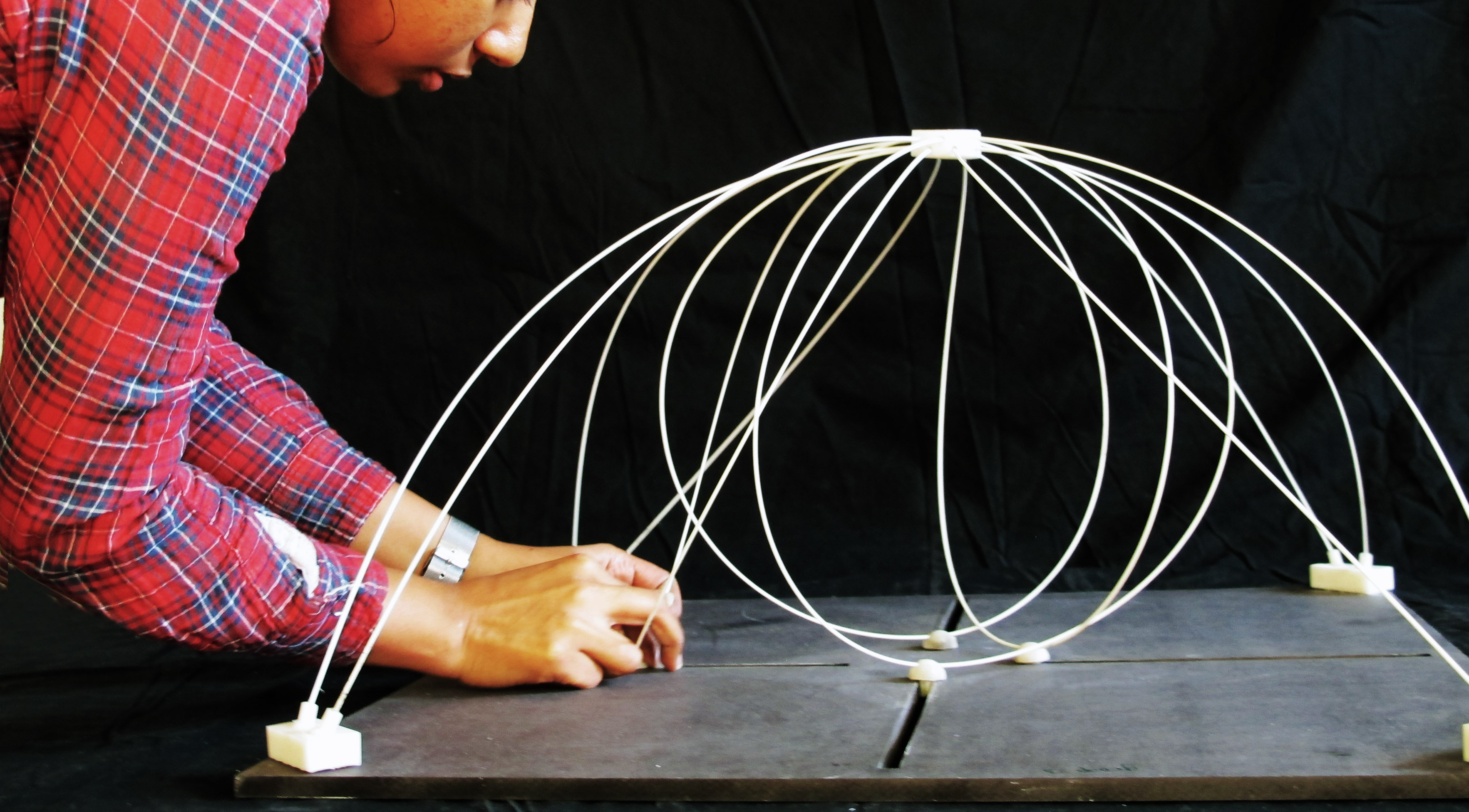
the process…
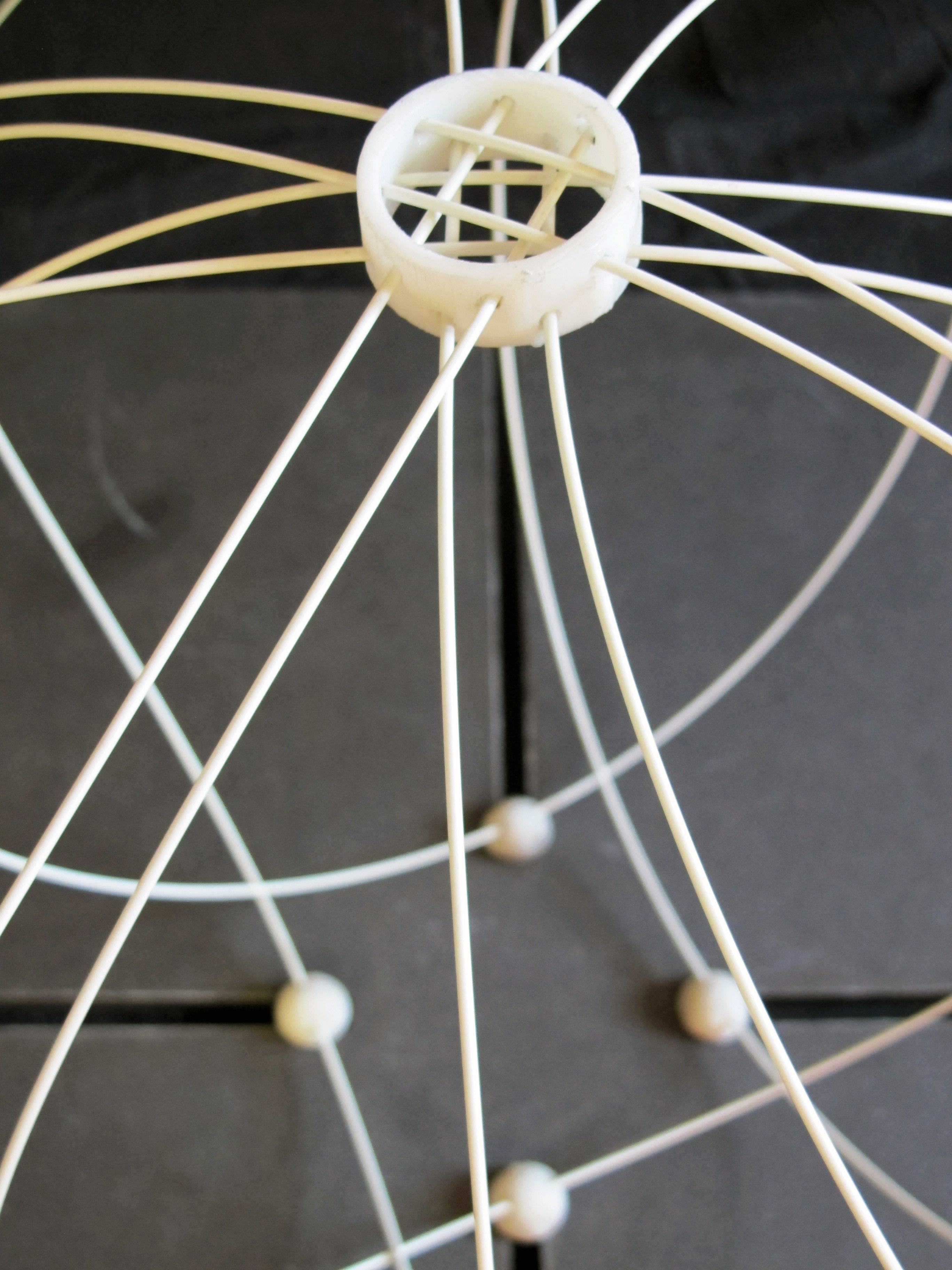
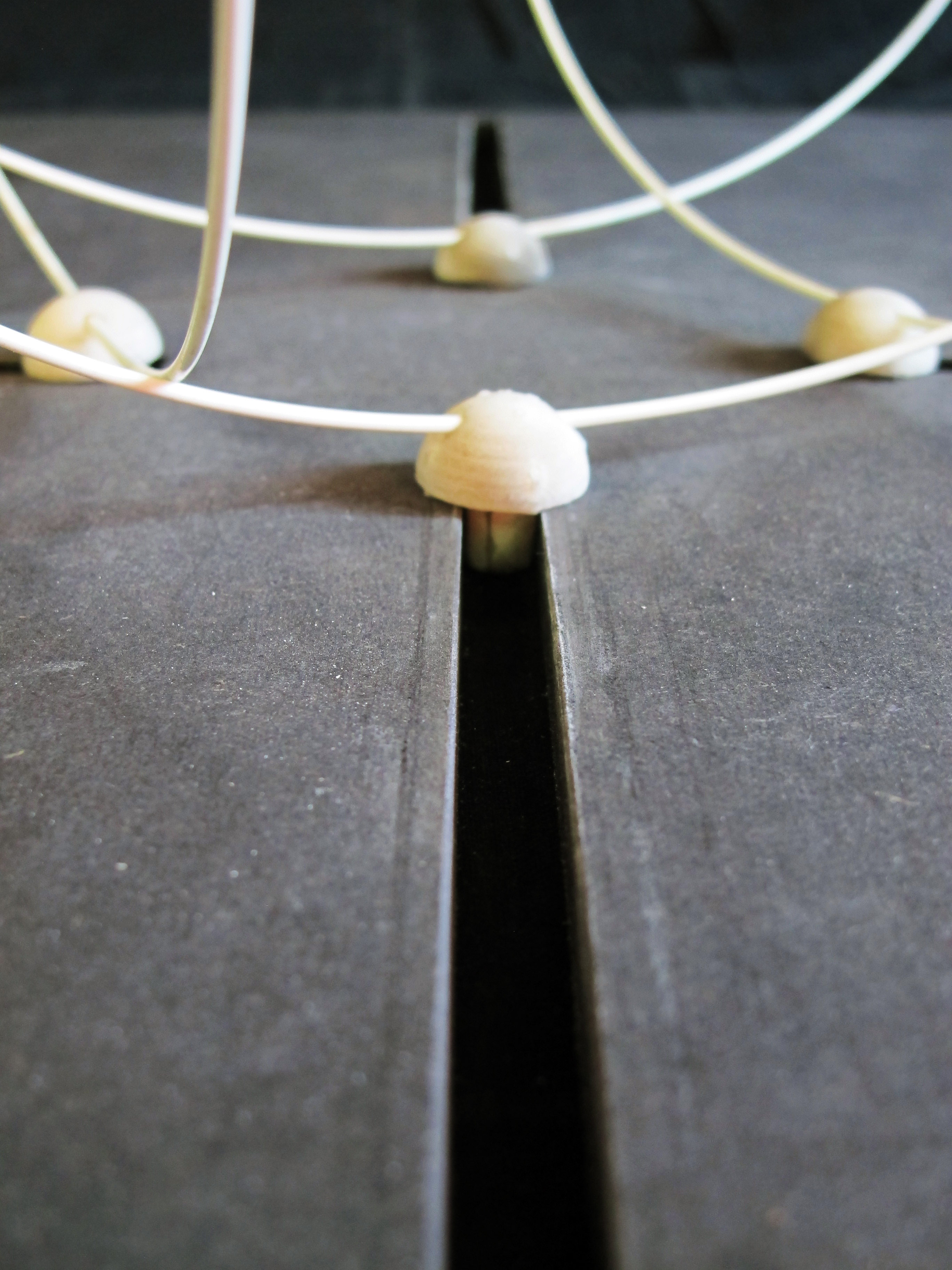
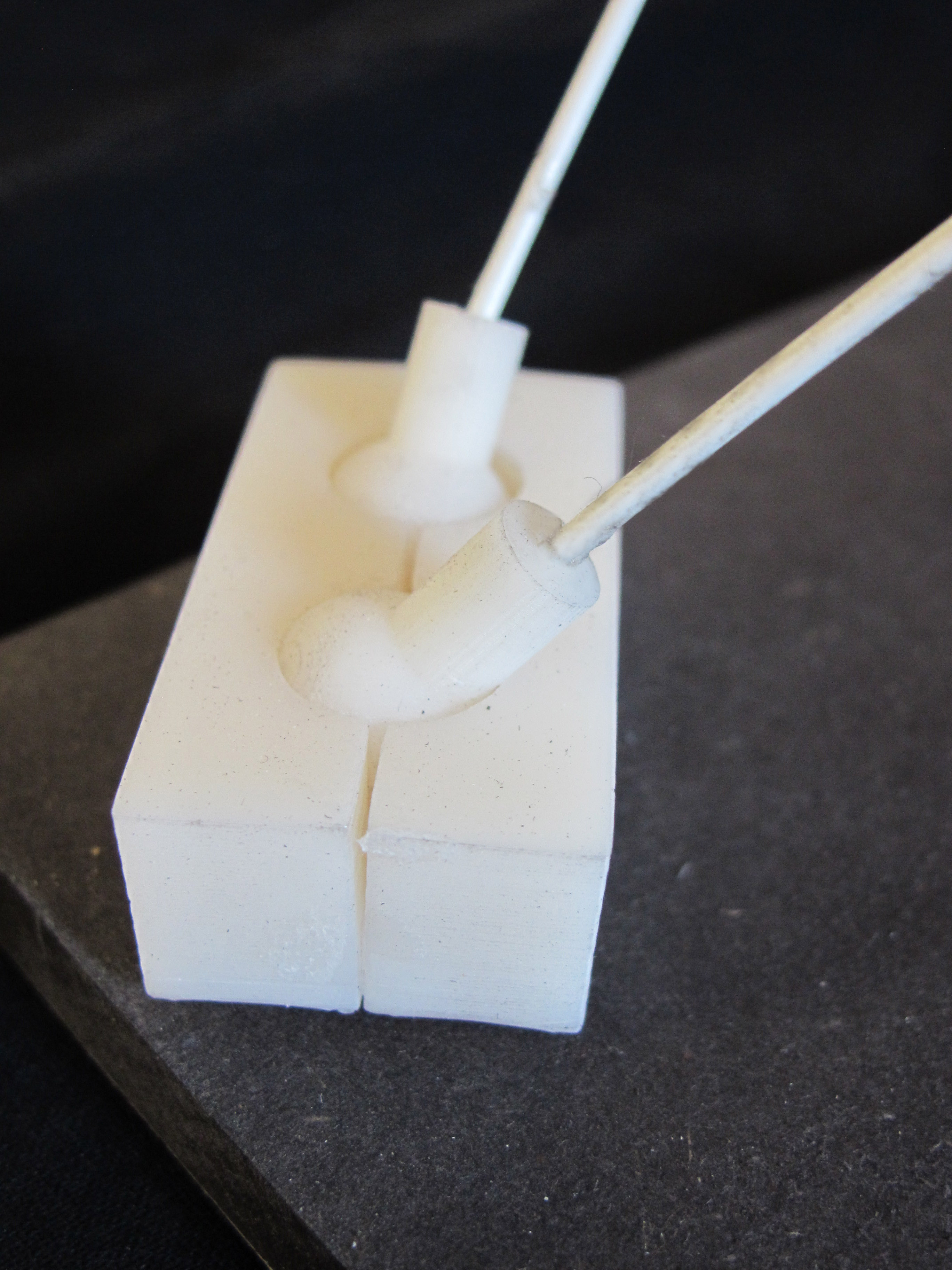
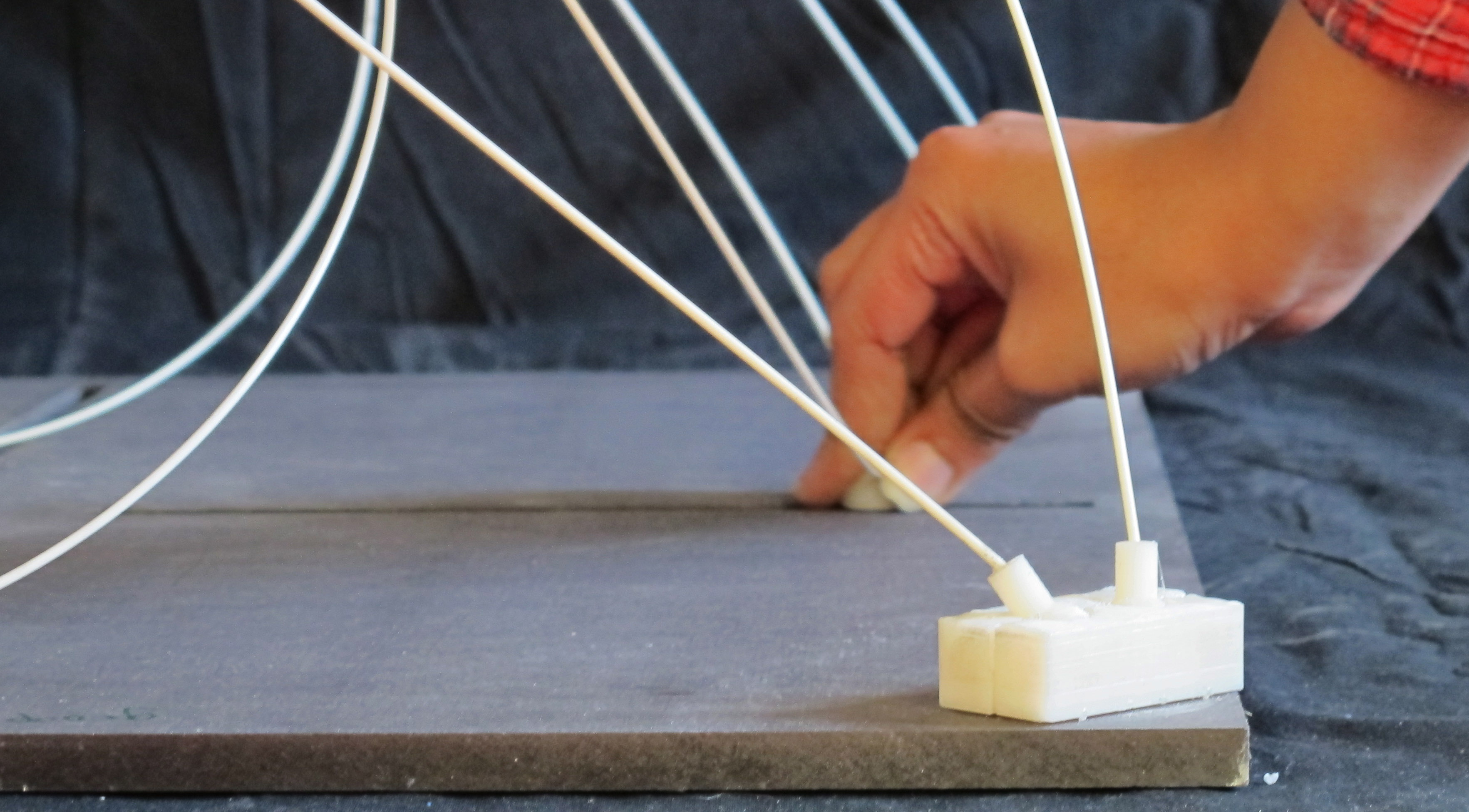
the joints…